智能车高速稳定行驶局部路径规划算法
一段圆弧目标转向半径的确定
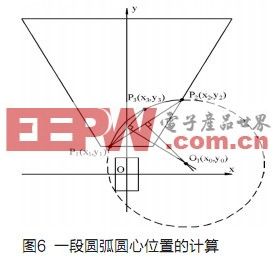
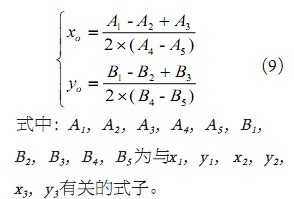
由一段圆弧上三点坐标,通过求两条弦线中垂线交点的方法可求出圆心坐标,如图6所示,其中P1(x1,y1),P2(x2,y2),P3(x3,y3)为经过偏航算法坐标转换后一段圆弧上的三点,O1(x0,y0)为圆弧圆心。计算可得:
得到圆心坐标后,计算三点中任意一点与圆心的距离即为道路中心线圆弧半径R1。同时可求出相应的与其同心且半径为R2的一段内圆弧,保证智能车沿该段内圆弧行驶时内侧车轮刚好处于不触及道路边界的临界状态,即

式中Wr为道路宽度,Wc为智能车几何宽度。
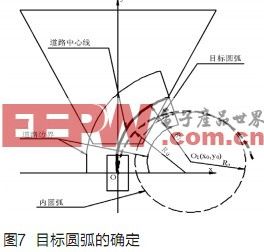
目标圆弧即为通过世界坐标系原点O且与内圆弧相内切的一段圆弧,如图7。计算可得,目标转向半径R0为:
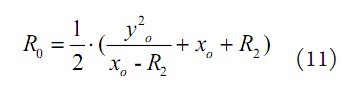
式中x0,y0为道路中心线圆弧圆心的横坐标和纵坐标,R2为内圆弧半径。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

