智能车高速稳定行驶局部路径规划算法
CCD传感器标定
假设道路为水平面,故在二维平面内标定CCD传感器,从而建立CCD图像坐标系与世界坐标系的对应关系。如图2所示,图像坐标系原点位于图像左下角,坐标轴u、v分别为CCD图像平面的横向和纵向;世界坐标系原点O'位于智能车几何中心,x'和y'轴分别为智能车横向与纵向对称面在水平面的投影线;中间坐标系原点O1'位于视场最近端中点,x1和y1轴分别为中间坐标系所在平面的横向和纵向。图2中各参数的物理意义与几何尺寸数值见表1。
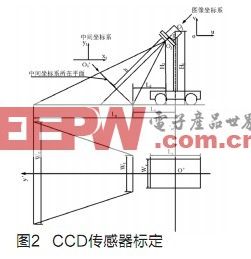

由于CCD摄像头存在俯仰角以及镜头加工工艺和装配精度等因素的影响,采集的图像存在梯形和桶形失真,故基于小孔成像原理校正失真[6]:
视野同一点在图像坐标系与中间坐标系的坐标分别为(u,v)和(x1,y1),通过实验标定二者关系如下:
式中a1,b1为实验标定的拟合系数;a[v-1], b[v-1], c[v-1]为实验标定的拟合向量的第v个元素(即拟合系数)。
依据图3所示的几何关系,可得到坐标(x1,y1)与(x', y')的相应关系。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

