基于UHF RFID技术的室内定位系统设计
引言
近些年,物联网的兴起为我们的生活带来了极大的便利。利用局部网络或互联网等通信技术把传感器、控制器、机器、人员和物品等通过新的方式连在一起,实现信息化、远程管理控制和智能化的网络。现阶段物联网的应用大多在室内,而物体位置感知作为物联网中很重要的组成部分之一,却无法通过传统的卫星和蜂窝定位来获取。无源超高频RFID室内定位作为室内无线定位技术之一,正得到快速发展,然而,RFID标签定位依然存在诸多问题亟需解决。
在传统的无线传感器网络中,基于测距的定位方法主要依赖的测量参数包括时间、能量和角度,然而对于RFID系统,带宽的限制使其无法使用时间法和角度法,使用能量法得到的测距结果精度太差。考虑到RFID系统的特点,其信号的发送载波是一个单频信号,可以通过提取载波相位来获取相位变化差,由此获取距离信息。本文通过对Impinj R420读写器设备进行二次开发获取载波相位,并使用基于Impinj的Indy R1000开发板获取能量信息,将相位法和能量法得到的距离分别运用到定位上,通过算法优化最终进行定位,并证明了相位法测距定位在室内小环境定位中的优越性。
1 系统总体结构
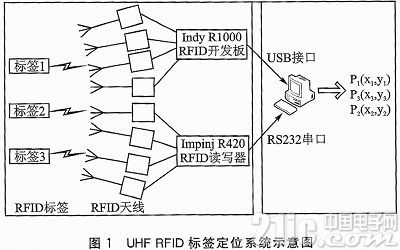
UHF RFID室内定位系统通过获取距离测量信息来定位待测物体坐标,故系统主要分为两部分:测距部分和定位部分。距离信息的获取主要涉及到两个参数:RFID信号传输过程中的能量衰减和载波信号相位的变化值。其中能量信息通过R1000开发板来获得,相位信息通过Impinj R420读写器来获得。将获得的参数信号传入PC,通过定位算法来确定RFID标签的位置。整个定位系统结构如图1所示。
2 UHF RFID标签系统测距部分
RFID标签是产品电子代码(EPC)的物理载体,附着于可跟踪的物品上,可全球流通,并对其进行识别和读写。ISO18000—6协议对UHF RFID通信作出了详细的规定,我们使用中国大陆UHF RFID的工作频段920~ 925MHz进行标签定位实验。
2.1 UHF RFID工作原理
读卡器和标签的通信是基于ITF(Interrogator Talk First,阅读器先发言)机制的,即基于读写器的命令与读写器的回答之间交替发送的半双工机制。读卡器和标签完整的通信过程如下:读卡器首先向标签发送一个Query命令,解调出该命令的标签随即进入确认状态,此时标签将向读卡器反向反射一个16位的随机数RN16,读卡器将发送包含相同RN16的ACK信号给标签,若标签接收到的ACK信号包含的RN16信息与之前发送的RN16信息相同,则标签转入确认状态,并反向散射PC+EPC+CRC16信息给读卡器。在通信过程中提取能量和相位的变化值进行测距。
2.2 能量法测距原理及硬件结构
经过传播路径损耗,接收端接收到的信号功率PRX(dBm),可以通过信号传输公式得到:
其中,PTX是阅读器发射功率;Greader和Gtag分别是阅读器和标签的天线增益;Lsys是系统内部电路损耗,在读写器发送信号时,发送功率可以人为设置,Lsys。可以通过反馈线接上衰减器将信号输入频谱仪,观察衰减情况。当信号经过标签反射时,读写器接收反射信号并测出PRX,这样就可以计算出路径损耗LP(d),根据Friss公式便可以计算出信号传播路径。
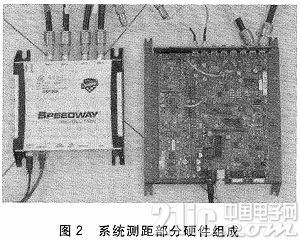
能量信息主要通过基于射频芯片Indy R1000开发板测量得到,如图2右侧所示,R1000使用EPCglobal超高频第一级(Class 1)第二代标准和ISO18000—6标准,传输调制模式有DSB、SSB、PR—ASK三种,工作频率为840~960 MHz。R1000采用了56引脚8 mm2QFN封装格式,集成了大约100个元件,负责传送、调制、接收、处理这些来自EPC Gen2电子标签的无线电通信信息。
R1000内包含了一个能源扩大器,使得它可以在近距离或者2 m内对标签进行编码和阅读,如果有外接能源扩大器,则使用R1000的读写范围可以达到10 m以上。在开发板中,R1000和单独的MCU连接,MCU将R1000数字信息处理器产生的原始数据转换成EPC或者ISO18000—6格式的代码。
2.3 相位法测距原理及硬件结构
对于相位信息的测量,信号传播的距离与相位变化的公式为:
d=(φ·c)/(2πf) (2)
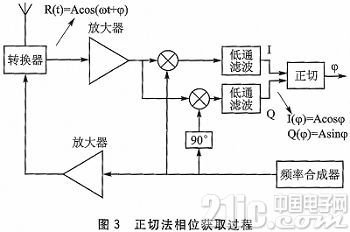
相位获取过程如图3所示。由于使用的RFID频段工作在900 MHz频段上,信号在载波相位一个2π周期变化内所传播的距离很短。在实际测量时,无法知道相位变化了多少个周期,这样就会产生相位模糊问题,因此使用相位差测距法。
选取两个频率相近的载波f1和f2,载波初始相位为φ1,b和φ2,b,阅读器接收信号时载波最终相位分别为φ1,e和φ2,e。对于载波f1,相位变化值为△φ1=(φ1,e-φ1,b),对于载波f2,相位变化值为△φ2=(φ2,e-φ2,b);则在相位差测距法中,距离d为:
d=(△φ11-△φ2)·c/[4π(f1-f2)] (3)
图2左侧为Impinj R420读写器,通过其获取相位信息。R420核心射频芯片为Indy R2000,为R1000的升级版,不仅支持EPCglobal标准和ISO18000—6标准,而且可以配置其他协议。R2000采用64引脚9 mm2 QFN封装,在功耗和接收灵敏度方面比R1000有所提高。芯片内部结构如图4所示。
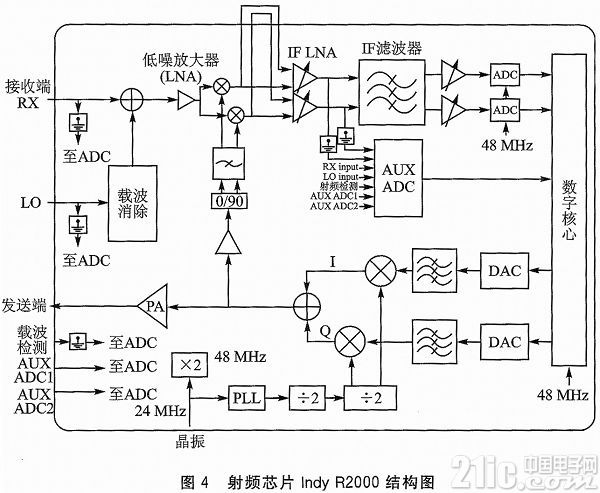
数字核心选择好载频点后,输出信号,经过DAC和频率选择滤波器,形成I/Q两路信号。与载波相混后两路信号叠加,再经功放发送出去。当芯片接收到信号时,与载波相加,过低噪放大器后与发送信号相混,通过频率选择滤波器和频选放大器获取基带信号,通过ADC将信号送至数字核心。
虽然Indy R2000的底层射频协议(LLRP)中包含载波相位的提取,但其自带的软件并不读取这一部分信息,因此,需要借助Impinj公司的二次开发包OctaneSDK来获得载波相位值。
3 UHF RFID标签系统定位部分
通过系统测距部分,获得了标签到阅读器天线之间的距离,将通过线性化最小二乘法和加权残差法求出标签位置。
3. 1 线性化最小二乘法
假设定位环境有N个位置已知天线Xn(xn,yn),i=1,2,…,N,位置未知的标签为P(x,y)。阅读器对天线进行测量,共有N个测量方程,en为测量误差:
3.2 加权残差定位方法
在测量过程中,会出现部分测量数据不准确的问题,并造成整体定位误差较大。引入加权残差方法,通过对测量方程增加权值,将较大误差的处理转换成权值的选择,最终完成标签定位。定义标签坐标P的残差平方和为:
4 系统测试结果
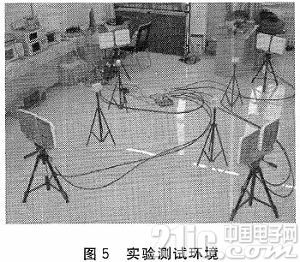
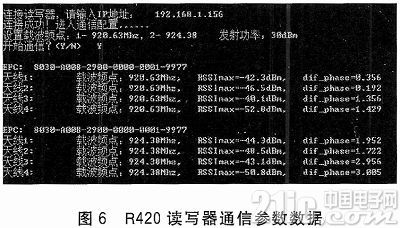
选择一块3 m×3 m的正方形区域,如图5所示。天线使用Larid公司右相圆极化远场天线S9028PCR,最大增益为9 dBic,回波损耗为18 dB。将4组天线放置在4个顶点,每组天线上有2个天线,分别连接到Indy R1000开发板和R420上,标签随机放置在正方形区域内,设置阅读器发送信号功率为30 dBm,载频点为920.63 MHz和924.38 MHz,使得信号载波在这两个频点上不断变换。打开软件,开始进行测试。随机在测量区域内选取4个位置放置UHF RFID标签,通过四周的天线与阅读器进行通信。
在足够长的一段通信过程中,如图6所示,通过软件获取这段时间内阅读器接收到的最大的RSSI值和相位值变化的平均值,经过处理计算,得到标签坐标。
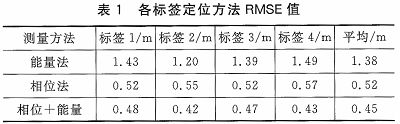
我们定义系统的均方根误差(RMSE)来衡量系统定位精度。RMSE的定义式如下所示:
(x0,y0)为标签的真实坐标。表1显示了分别用不同的测距数据得到的定位误差。
结语
本文通过对UHF RFID标签通信过程中相位和能量的提取,完成了室内定位系统。可以看出在小环境中,使用相位法进行定位比传统的使用能量法进行定位精度要提高很多。但是在复杂室内环境下,相位法定位会受到很大的影响,在后续工作中,可以在定位算法上改进,来弥补由于测距不准产生的误差对最终定位产生的影响。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码