基于DSP+CPLD的伺服控制卡的设计
采用的单神经元PID及CMAC相结合的复合控制算法,完成对位置伺服控制器典型输入斜坡输入响应的仿真实验。
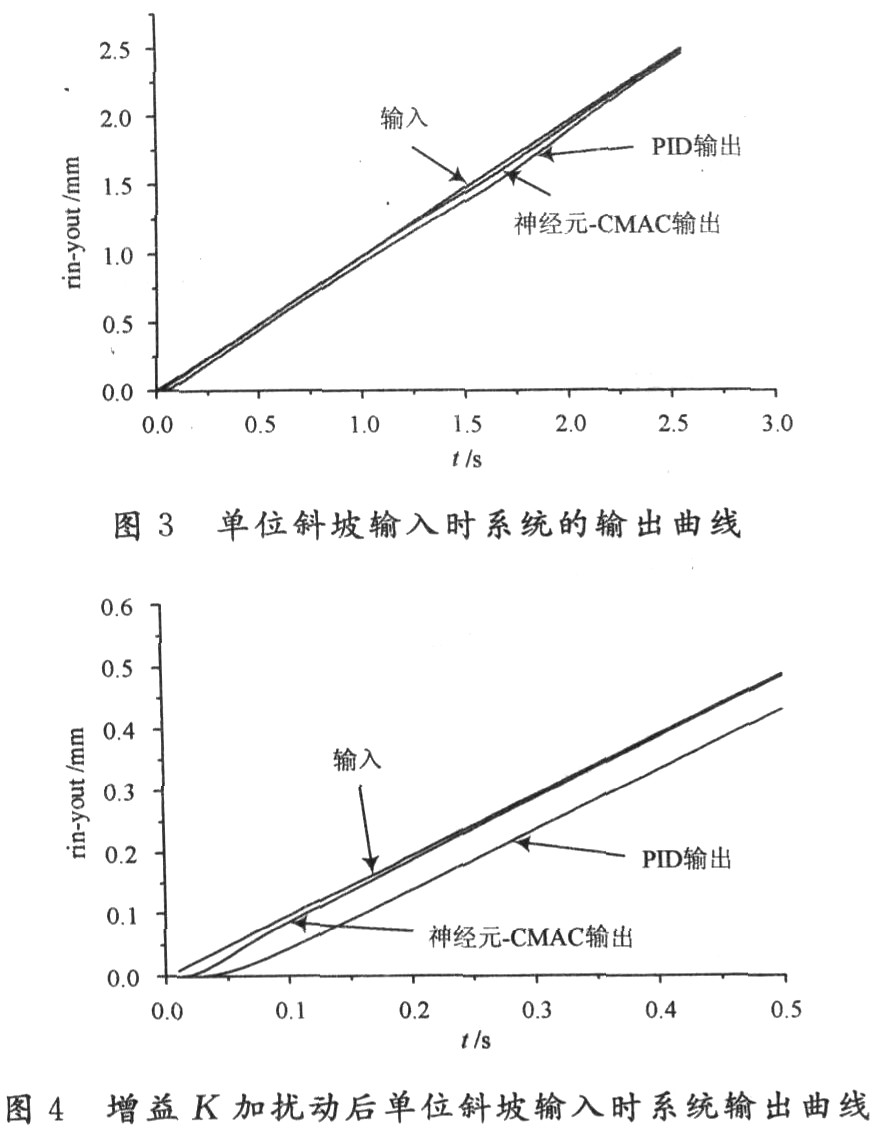
图3和图4分别是位置伺服系统的单位斜坡输入响应曲线图,通过对图形的分析,可以看出,单神经元PID与CMAC相结合控制算法比常规PID控制算法有更小的跟随误差,直接决定该控制系统的控制精度。图4是在输出端加入lO%的阶跃扰动后,两种控制算法的输出曲线图,由图可知单神经元PID与CMAC相结合控制算法比常规PID控制算法有更好的抗干扰能力。
3 结 语
针对位置伺服控制系统的特点,设计了一种基于神经网络控制算法的伺服运动控制卡,将单神经元PID与CMAC并行控制的伺服控制算法应用在位置伺服系统的位置环控制。仿真结果证明了该控制算法较常规PID控制有更好的动态特性、控制精度、抗干扰能力,而且具有自适应功能。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码