基于MATLAB的线性二次型最优控制
0 引言
倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统。在控制过程中,它能有效地反应控制理论中诸如系统稳定性、可控性、鲁棒性、系统收敛速度、随动性以及跟踪等问题,是检验各种控制理论的理想模型。线性二次型最优控制(Linear Quadratic Regulator,LQR)问题在现代控制理论中占有非常重要的位置,其优势在于控制方案简单,超调量小,且反应速度快,该方法不仅对单级倒立摆系统能够进行有效控制,且已经成功的应用于直线双倒立摆[1]和双足机器人的控制[2]。
本文针对单级倒立摆系统,完成了具体的系统建模及LQR控制的MATLAB仿真,通过增加系统自身的扰动及改变LQR控制器中加权阵R,对比仿真,得到了良好的控制效果。
1 单级倒立摆建模
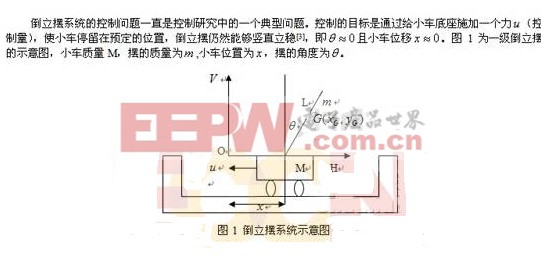
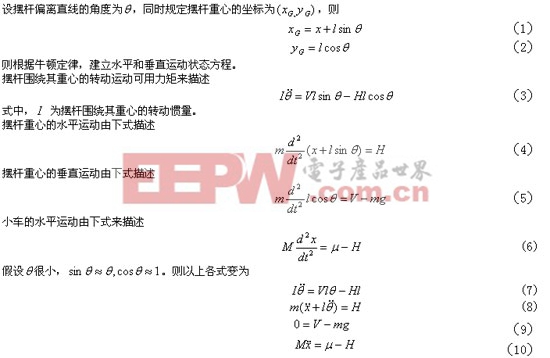
实际的单级倒立摆系统比较复杂,除了各组成器件的非线性外,还受到各种干扰,为分析其本质,需要对实际系统进行简化[4]。简化约束条件如下:
(1) 将摆杆视为质量均匀分布的刚体细杆;
(2) 各部分的摩擦力与相对速度成正比;
(3) 施加在滑块上的驱动力与加在功率放大器上的输入电压成正比,并无延时地加到滑块上;
(4) 出皮带轮与传送带之间无滑动,传送带无延长现象;
(5) 除滑块与导轨之间的摩擦及摆杆转轴的摩擦外其它摩擦及阻尼的影响均忽略。

1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码