VHDL-AMS在控制系统分析与设计中的应用
PID控制器主要由三部分组成:比例环节,积分环节和微分环节。其中比例环节反映控制系统的偏差信号e(t),偏差一量产生,控制器立即产生控制作用,以减少偏差;积分环节主要用于消除静态误差,提高系统的无差度;微分环节反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
PID控制器是一种线性控制器,根据给定值r(t)与实际输出值y(t)构成控制偏差:
e(t)=r(t)-y(t) (1)
PID的控制规律为:
式中kp为比例系数;TI为积分时间常数;TD为微分时间常数。
将式(2)写成传递函数的形式:
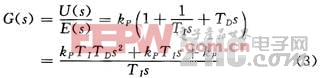
设定忌kP=60,TI=60,TD=0.05,由式(3)可对PID控制器建模如下:
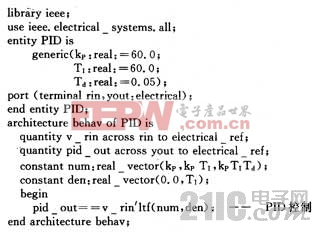
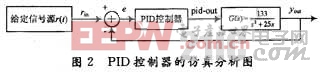
SystemVisiON是Mentor Graphics公司开发的支持VHDL-AMS的Windows集成开发环境。在SystemVision环境下,由文中的VHDL-AMS程序建立PID控制器模型,并以二阶线性传递函数为被控对象,建立图2所示的仿真分析系统。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码