内模PID控制器在无刷直流电机调速系统中的应用
内模控制是基于过程数学模型进行控制器设计的控制策略,通过引入低通滤波器建立关于研究对象或参数与控制器的内部数学模型,实现基于内部模型的新型控制策略。其中λ为滤波器常数,是内模控制需要整定的参数,它对系统性能和鲁棒性有显著影响。需要在快速性和鲁棒整定之间折巾,尤其是在时变时延系统中,对时延的鲁棒性,λ有着非常重要的作用。
3 IMC-PID控制器的设计
根据图4可做出内模控制结构的等效图如图5所示。
将式(8)等式右边展开成s的Taylor级数,再由s多项式各项幂次系数对应相等的原则,即求解可得基于内模控制原理的PID控制器的各参数。
第4步:整定滤波器常数λ。
4 IMC-PID控制器参数整定
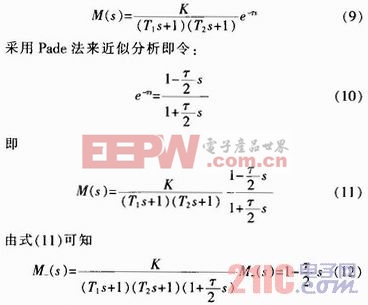
由上述分析可知,被控对象的过程模型可分解为纯滞后环节和最小相位环节两部分,其中纯滞后环节部分分析比较复杂,故设计中一般采用Pade法来近似分析。由式(8)可知,基于内模原理的PID控制器中所需要整定的唯一参数是λ,通过第二节中对被控对象的分析可知其过程模型可近似为二阶加纯滞后环节,其模型结构如式(9)所示:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码