一种新的模糊PID控制在电机软启动中的仿真
(2)数据库的建立
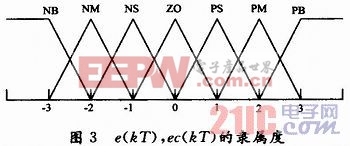
设e(kT),ec(kT)的论域为:X={-3,-2,-1,0,1,2,3},在其论域上取7个变量NB,NM,NS,ZO,PS,PM,PB。对变量e(kt),ec(kt)采用均匀分布的高斯三角隶属函数,如图3所示。图3中e(kT),ec(kT)的隶属度。
(3)规则库和模糊推理
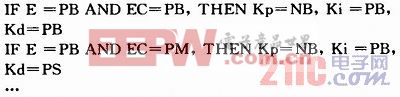
模糊控制器的规则库是基于专家知识或手动操作人员长期积累的经验,根据各参数的规则表进行模糊推理。模糊推理如下:
(4)解模糊
输出量为KP,KI,KD,其论域、语言变量e(kT),ec(kT)一样,此处采用加权平均解模糊的方法,即:
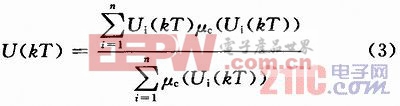
式中:U(kT)为清晰化值;Ui(kT)为模糊控制器输出;μc(Ui(kT))为对应于Ui(kT)的隶属度。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码