利用超声波和红外线实现综合测距定位
3 系统总体方案
本文研究目标是利用单片机应用技术及传感器探测技术,开发一套传感器定位测距系统。该系统将采用超声波传感器来测距,采用红外线传感器来定位,其组成框图如图3所示。
系统包括四部分:超声波收发部分、红外线收发部分、控制部分和显示部分。控制部分是一个单片机系统,包括信号发射功能、信号判断和分析功能以及控制显示功能。
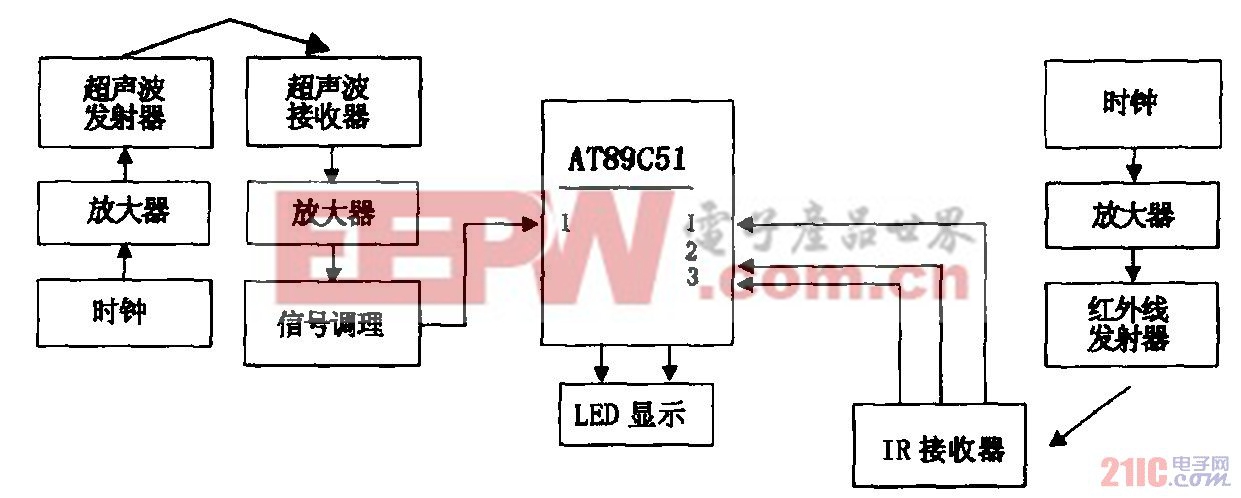
图3 系统总体框图
4 系统硬件设计
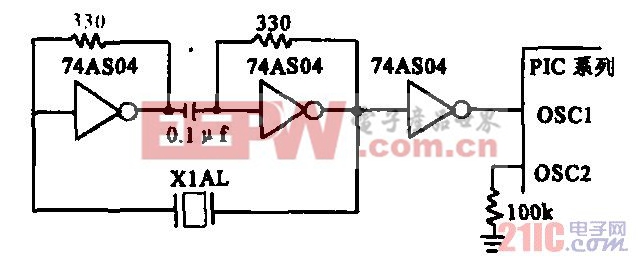
图8 外部串行谐振振荡电路
图8所示为一种典型的外部串行谐振振荡电路。该电路也是应用晶体的基频来设计。其中,74AS04反相器用来提供振荡器所需的180°相移,330Ω的电阻用来提供负反馈,同时偏置电压。
4.1.3 RC振荡
RC振荡适合于对时间精度要求不高的低成本应用。RC振荡频率随电源电压VDD、RC值及工作环境温度的变化而变化。
由于工艺参数的差异,对不同芯片而言其振荡器频率将有所不同。另外,当外接电容CEXT值较小时,对振荡器频率的影响更大。同时,电阻电容本身的容差对振荡器频率也有影响。图9所示为RC振荡电路,如果REXT低于212kΩ,振荡器将处于不稳定工作状态,甚至停振。而REXT大于1MΩ时,振荡器又易受噪声、湿度、漏电流的干扰。因此,电阻REXT取值最好在3~100kΩ范围内。在不接外部电容时,振荡器仍可工作,但为了抗干扰及保证稳定性,建议接一20pF以上的电容。
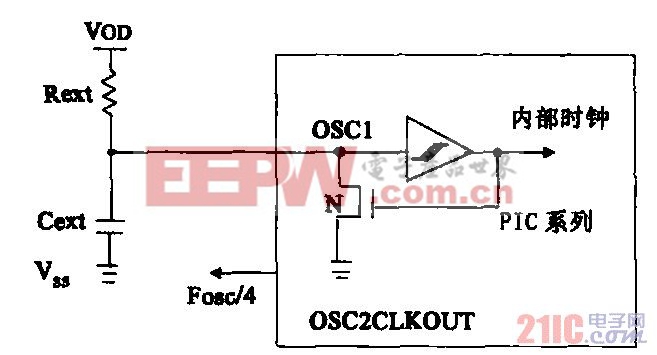
图9 RC振荡电路
本系统选取晶体振荡器作为微控制器的时钟输入,并选取6MHz时钟频率作为系统时钟周期,既可以满足系统频率的要求,又可以克服阻容振荡器精度不足的缺点,是一种较为适宜的设计选择。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码