基于电磁场检测的寻线智能车设计
设计方案
本设计使用一普通玩具小车作为车模,采用PWM信号驱动,当PWM信号脉宽处于(1ms,1.5ms)区间时舵机控制小车向左行驶,脉宽处于(1.5ms,2ms)时小车向右行驶,脉宽约为1.5ms时小车沿直线行驶。本方案使用两个10mH的电感置于车模头部作为确定小车位置的传感器。然后,设计了一个模拟电路,采集、调理、放大由电感得到的电动势信号。具体电路如图6所示。

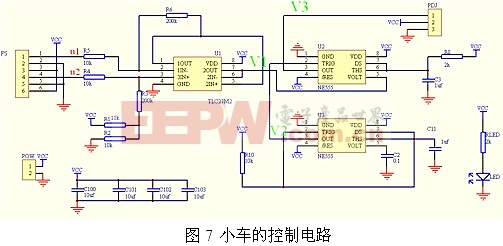
该电路采用电压并联负反馈电路,电感信号从PL进入。考虑到单独电感感应出的电动势很小,本设计使用电感和电容谐振放大感应电动势。由于使用的是10mH的电感,导线中电流频率为20kHz,因此使用6.3nF的电容。这样在电容上得到的电压将会比较大,便于三极管进行放大。整个电路的具体放大倍数需要根据实际负载进行计算。本设计的小车控制电路如图7所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码