光纤陀螺仪动态范围扩展方法研究
摘 要:动态范围是光纤陀螺一项重要的动态特性指标,它反映了陀螺在不同输入状态下的适应能力,因而具有重要的研究价值。随着工作环境对光纤陀螺性能要求的不断提高,扩展光纤陀螺动态范围技术也一直在发展与进步。本文在通过梳理不同的动态范围扩展方法,根据其特点,将其大致分为:优化光纤环的设计参数类、开环检测方案类、数字闭环控制方案类,并对各类光纤陀螺动态范围扩展方法进行综述。
关键词:光纤陀螺仪;动态范围;动态范围扩展
0 引言
光纤陀螺仪是一种理想的全固态捷联惯性器件,具有响应快、动态范围较大且成本相对较低的众多优点,经过快速发展,已成为相关装备市场的主角被广泛应用 [1-2]。而动态范围是一项反映陀螺在不同输入状态下的适应能力的重要动态特性指标,因而具有重要的研究价值。
由于开环光纤陀螺结构简单、易制造,在光纤陀螺发展初期使用较多。因而对提升光纤陀螺测量能力的研究也主要是围绕其展开的。尤其是信号处理技术和锁相技术方面的方法研究是早期提高光纤陀螺动态测量范围最卓越的两种方案 [3]。然而,开环光纤陀螺对输入角速率的响应是非线性响应,当输入角速率增大时标度因数非线性也会随之增大,基于此的扩展动态测量范围方法往往是以牺牲随着光纤陀螺的精度为代价 [4],这严重影响了光纤陀螺在一些敏感大角速率且精度要求较高的工作条件的应用,于是以开环光纤陀螺的输出量作为反馈量构成闭环系统的控制方案应运而生,这种控制方案大幅提升了光纤陀螺的测量能力,现行的光纤陀螺动态范围扩展方法基本都是在其基础上实施的,主要有两类:一种是跨干涉条纹调制法,而跨干涉条纹调制方法需加入辅助测量结构如 MEMS 或者从光纤环;另一种是基于单级干涉条纹的量程扩展法 [5]。
本文在通过梳理不同的动态范围扩展方法,根据其特点,将其大致分为:优化光纤环的设计参数类、开环控制类、闭环控制类。并对各类光纤陀螺动态范围扩展方法进行综述。

根据式(1),若在设计光纤陀螺时优化光纤环的设计参数,合理调整光纤环的长度与直径,适当减小二者的乘积可以提高光纤陀螺的动态测量范围。这是最容易想到也是最早的被用来提升光纤陀螺的测量范围的方法,虽然工艺上实施的难度不大,但这种方法一般会降低光纤陀螺的灵敏度。因而需要其他方法来解决陀螺检测精度和动态范围间的“矛盾”。
2 开环检测方案
早在 1984 年,Kersey 等人在研究了“相位零化技术(Phase nulling)[6]”、“外差法(Heterodyne)[7]”和“谐波反馈技术(Harmonic feedback)[8]”后,在其文章 [6] 中提出一种新的方法——“伪外差法(Pseudoheterodyne)”对扩展光纤陀螺的测量范围进行了讨论,该方法的实验模型如图 1 所示 [9]。

图1 伪外差陀螺仪的光学和电子布局示意图
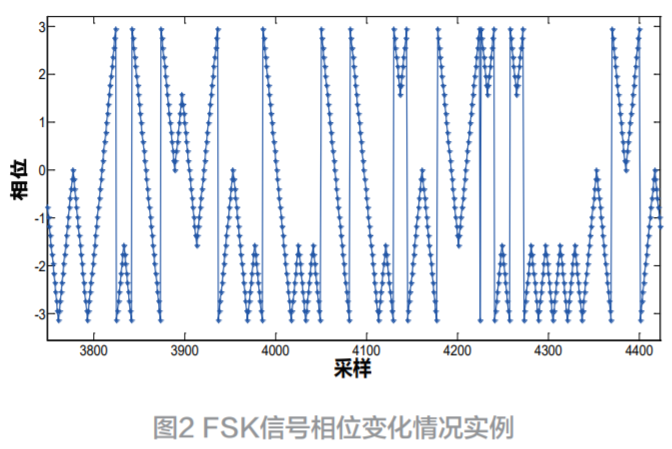
作者通过 PZT 相位调制器对光纤环施加正弦波调制 , 调制信号再由光电二极管进行光电转换后,将其和 1 个与正弦波调制信号同频的门控信号相结合,再经过带通滤波器产生一个低频“外差式”输出载波信号,最后通过比较低频电子载波信号的相位和相位调制器信号二次谐波间的关系,从而解调出 Sagnac 相移。得到动态范围与有效调制相位间的曲线关系,如图 2 所示。

图2 动态范围与有效调制相位关系示意图
1986 年,Kersey 等 [10] 人又提出了一种基于测量两种不同波长的光的 Sagnac 相移( ∅s ),利用“合成外 差解调算法”实现了光纤陀螺仪动态范围扩展的方案,其原理如图 3 所示。对光纤环施加方波调制,此外,为 了便于陀螺输出波长的解复用,还需要对光电转换后的信号也施加方波电流调制,最后经过带通滤波器得到两个输出载波信号:S1 和 S2,而载波信号中包含了各自波长光波的 Sagnac 相移( ∅s ),这样就将两个载波的比较转化为了 Sagnac 相移差,进而转换为波长差的比较,于是扩展的动态范围的限制便由所使用的精确两束光的波长差决定的,文章指出可以比使用单一波长得到的范围大 100 倍以上。

图3 双波长陀螺仪原理图
1997 年,张春熹 [11] 根据开环系统的输出信号特点,提出信号处理的方法提高动态范围。他将开环光纤陀螺光电检测器上的信号作贝塞尔函数展开,利用锁相放大技术取出一次谐波和二次谐波,再根据一次、二次谐波的正余弦关系曲线,将二者相除,然后根据反函数求解出 Sagnac 相移。文章指出,通过这种方案,取参数 L= 730 m、D = 100 mm、λ = 1 310 nm 的开环光纤陀螺,对于随机变化的转速输入,动态测量范围为 ±152.5°/s。
2000 年,孙圣和等 [12] 人设计了一种基于 DSP 的全数字信号处理方法来提高动态测量范围,其原理如图 4 所示,这种方案对于一个 L= 300 m、D = 125 mm、λ = 1 310 nm 的开环光纤陀螺其动态测量范围可达 ±595.5/s ,远远大于同时期的其他处理方法。

图4 基于DSP的光纤陀螺信号处理原理框图
盛钟延[13]提出了一种单通道光相位差跟踪的方法,它将检测到的开环光相位信号按零阶贝塞尔函数展开,利用其零阶零点构造跟踪信号反馈回电路,使得检测信号与反馈信号差值趋向于零,这样就提高了开环光纤陀螺的测量能力。
2003 年,付雷 [14] 从数学解算方法入手,提出了一种拟合相位的方法,该方法对测得的数据利用最小二乘和最小范数法求其反正正切值的拟合方程系数 , 再利用拟合方程作出动态范围在 ±300°/s 的 2 000 多个数据的反正切值表,之后就可以结合线性插值法查找陀螺的输出。这种方法不光在一定程度上提升了光纤陀螺的测量范围,而且也大大降低了对数字处理器件的要求,有利于降低陀螺的成本。
然而,开环光纤陀螺对输入角速率的响应是非线性响应,当开环光纤陀螺的输入角速率增大时,其标度因数非线性也会随之增大,严重影响了光纤陀螺在较高精度领域的应用,例如导弹发射、火炮等一些敏感大角速率且精度要求较高的工作条件,它们不光对光纤陀螺的精度要求较高,其工作环境对陀螺的动态测量范围也有着很大的考验。
3 数字闭环控制方案



3.1 双光纤环辅助测量法
双光纤环法构想最早由美国海军研究实验室的 Williams K.Burns 和 Robert P.Moeller 于 1986 年提出 [15],文中的陀螺有两个光纤环:一个是环长较长的主光纤环,另一个是环长较短的从光纤环,主光纤环精度高而量程小,从光纤环精度低但量程大,根据光纤陀螺的工作环境不同,切换两种光纤环的工作状态从而满足工作环境的精度和量程要求。
受此专利的启发,2008 年,王巍 [16] 发明了一项基于双光纤环法辅助测量以实现动态范围扩展的专利。与美国专利不同的是,我们不再进行光纤环工作模式的切换,而是利用量程大的从光纤环的输出角速率来判断以主光纤环的输出角速率为主构成的光纤陀螺工作所处的干涉条纹的级别,从而达到对主光纤环的输出角速率进行修正的目的。即从环定量程,主环定精度,此方案大大提升了光纤陀螺的动态范围,专利所提出的陀螺结构如图 5 所示。

图5 数字闭环光纤陀螺的系统模型

3.2 MEMS陀螺
辅助测量法 MEMS 陀螺不但体积小、制造成本低,而且测量范围大,这为其可以作为光纤陀螺的辅助测量工具提供了条件。2014 年 Yu.Korkishko[17] 为解决陀螺的启动问题加入 MEMS 陀螺来辅助测量角速度值,同年,张娜 [18]提出了基于 MEMS 陀螺辅助测量以增大闭环光纤陀螺动态范围的方法。作者将 MEMS 陀螺的输出( ΩMEMS )与光纤陀螺输出( Ωf ) 作比较,利用其差值分析得出光纤陀螺工作所处的干涉条纹的级数,并对结果加以校正,校正的流程图如图 7 所示。利用该方法可将高精度光纤陀螺动态范围扩展至 MEMS 陀螺的动态范围。

图7 MEMS陀螺校正方案流程
3.3 基于单级干涉条纹的量程扩展法
2018 年,关帅 [19] 提出了一种改进的单级干涉条纹法来扩展光纤陀螺的动态范围。作者构建了两种函数关系来检测相位值,如图 8 所示,分别为:高精度的工作状态 1 和低精度的工作状态 2。将状态 2 的干涉条纹等效为多个包含状态 1 的干涉条纹,对测得的相位除以包含干涉的个数,得到光纤陀螺在工作状态 1 获得不足部分的相位值,将两种工作状态得到的相位相加,最终便得到了大动态输入下的光纤陀螺系统的反馈相位。

图8 改进的单级干涉条纹法原理图
参考文献:
[1] VA LI, V.&R.W.SHORTHILL. Fiber Ring Interferometer[G].Applied Optics,1976(5):1099-1100.
[2] 宋丽君.2019年国外惯性技术发展与回顾[C].
[3] BURNS.W.K. Fiber rotation sensing[M].Academic Press,1993.
[4] 王妍,张春熹.数字闭环光纤陀螺动态特性测试研究[J].北京航空航天大学学报,2004,30(9):818-821.
[5] 王巍.干涉型光纤陀螺仪技术[M].北京:中国宇航出版,2010(10):66-67,351-357.
[6] J.L.DAVIS, S.EZEKIEL. Closed loop, low-noise fibreoptic. rotation sensor[J].Optical Letters,1981,6(10):505-507.
[7] KAZUO HOTATE, NAOHIKO OKUMAN. Rotation detection by optical heterodyne fiber gyro with frequency output[J].Optical Letters,1982,7(7):331-333.
[8] KIM B.Y, H.LEFEVRE. Harmonic feedback approach to fibre gyro-scale factor stabilization[C].1st Int. Conf. on Optical Fibre Sensors,1983(4):221.
[9] A.D. KERSEY, A.C. LEWIN. Pseudo-heterodyne detection scheme for the fibre gyroscope[J].Electronics Letters,1984,20(9):368-370.
[10] A.D.KERSEYK, D.DANDRIDGE, W.K. Burns. Two-wave length fibre gyroscope with wide dynamic range[J]. Electronics Letters,1986,22(18):271-276.
[11] 张春熹,叶炜,周柯江,等.信号处理提高开环光纤陀螺动态范围的方法研究[J].浙江大学学报,1997,31(3).
[12] 孙圣和,张兆礼,付平.光纤陀螺全数字信号处理技术研究[J].仪器仪表学报,2000,21(6).
[13] 盛钟延,周柯江.光纤陀螺中一种光相位差跟踪方法[J].光学学报,2001,21(3):352-355.
[14] 付雷,陈淑芬,孟彦斌.数字式开环单模光纤陀螺中求arcsine的查表和线性插值法[J].北京理工大学学报,2003(04):499-502.
[15] MOELLER R.P., Burns. W. K..Analog fiber gyro with extended linear range[P].US4573797,1986-03-04.
[16] 高峰,王巍,王学锋,等.一种 增大光纤陀螺量程的方法[P].中国专利,CN101408426.2009-04-15.
[17] YU. KORKISHKO, V.FEDOROV, V. PRILUTSKII,et al. High precision fiber optical gyro with extended dynamical range[C]. Inertial Sensors and Systems,2014.
[18] 张勇刚,孙娜,李宁等.基于MEMS 陀螺辅助增大闭环光纤陀螺动态范围的方法[J].红外与激光工程,2014,43(9):3070-3074.
[19] 关帅.干涉式闭环光纤陀螺的大动态测量技术研究[D].哈尔滨:哈尔滨工程大学,2018.
(注:本文转载自《电子产品世界》杂志2022年11月期)

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码