智能车混合控制系统的设计与实现
梁家泰,程丽平
(山东科技大学,山东 泰安 271019)
摘 要:以全国大学生“恩智浦杯”智能车竞赛为研究背景,为解决单一传感器的智能车系统可靠性低和准确性不足的问题,提出了一种采用多种传感器混合控制系统,该控制系统将电磁引导技术、图像识别技术、超声波检测技术与PID算法相结合的方式实现对智能车方向的实时控制。同时该控制系统采用分段的模糊PID控制算法控制车速,根据赛道的情况实现速度的实时控制。在保证稳定性的前提下提高了平均速度,实现了对智能车的精确控制。本文从智能车的整体方案、硬件电路、控制策略、参数调整等方面对智能车混合控制系统进行介绍。
关键词:智能车;自动检测;寻迹;混合控制;速度控制
0 引言
循迹智能车作为汽车行业今后发展方向之一,受到越来越多的企业的关注和追捧从而对循迹小车的研究深度有待进一步提高 [1] 。循迹小车通过路径识别模块获取赛道信息,并由程序提取出赛道的中线信息,然后由单片机做出控制决策,控制舵机的转角和电机的转速。展望未来赛道元素越来越向真实道路靠拢,为适应赛道元素的复杂性,解决单一传感器局限性的问题,本文研究一种混合控制系统的智能汽车。本文就智能车混合控制系统中整体方案、硬件电路、控制算法这3个方面做出阐述。
1 整体方案设计
本文设计的控制系统共包含五大模块:电源模块、路径识别模块、测速模块、驱动模块、无线调试模块。
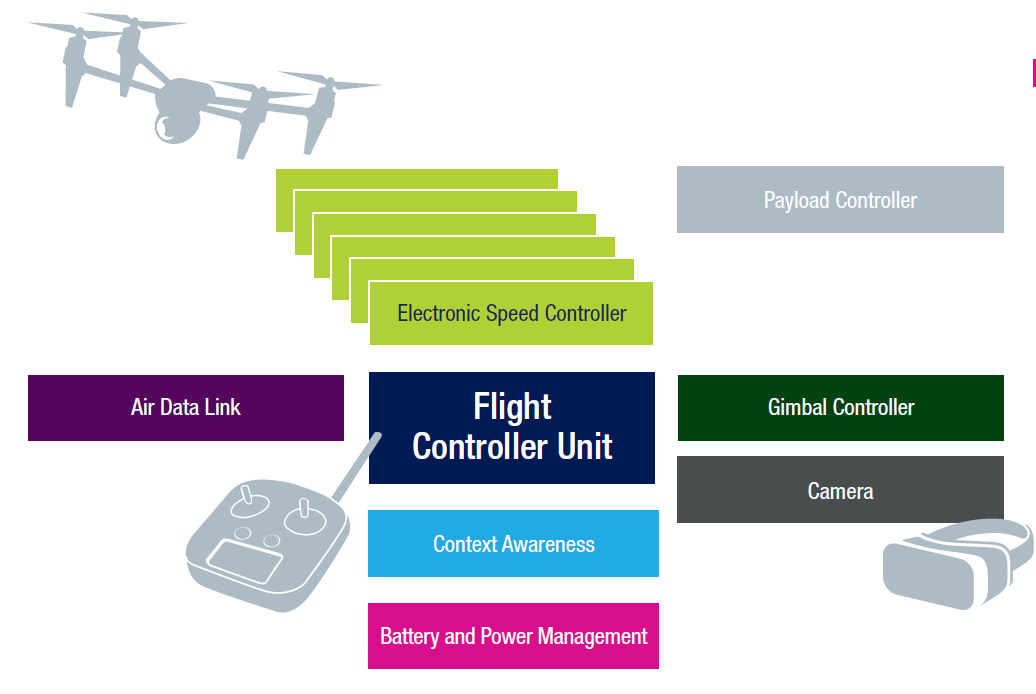
K60单片机通过路径识别获得智能车的当前位置,经过图像识别、电磁检测、超声波检测得到路径识别模块输出的位置信息,控制器计算得到当前位置偏差,从而得到智能车距离赛道中心线的偏差量。最终通过方向闭环的PID调节并结合舵机PWM波的输出,动态调整车身姿态,使其既快又稳地通过规定赛道。通过正交解码获取速度检测模块的速度信号,通过速度闭环的PID调节并结合电机PWM波的输出,实现对智能车的速度控制。同时为实时监控智能车的运行情况,控制系统加入了无线调试模块。智能车整体结构如图1所示。

2 硬件设计
本设计选用MK60FX512Q15单片机作为控制芯片,具有丰富的模拟、通信、定时、控制等模块,利用其丰富的片上资源,设计智能车外围电路,包括电源模块、数据采集、驱动模块等模块。
2.1 电源模块
智能车各模块所需工作电压不同,需要为各模块提供合适、稳定的工作电压。系统采用电池供电,供电电压7.2 V,设计电源电路,为各模块提供5 V、6.5V、3.3 V的电压,分 别 选 用LM1084_ADJ、L M 1 0 8 4 _ 5 、ASM1117_3.3芯片。由于电机驱动模块驱动电机时电池会发生较大的压降和电流,容易产生对其他模块的干扰因此,电机驱动模块单独供电。电源电路如图2所示。

2.2 路径识别模块
为保证复杂路况的检测可靠性,路径识别采用图像识别、电磁检测、超声波检测混合识别方式。
1)图像识别
采用OV7725数字摄像头作为采集赛道信息的传感器装置。OV7725数字摄像头可直接完成图像的二值化处理 [2] 。无需再次对图像进行软件二值化,极大减轻单片机的工作量,进而可以释放更多的资源用在算法控制上。

2)电磁检测
根据电磁学原理,在导线中通入变化的电流,如果在导线附近放置电感,则在电感上会产生感应电动势,且位置不同产生的感应电动势也不同 [3] 。据此,可以确定电感的大致位置。但是其感应信号较微弱,采用电压反馈型高速放大器ad8032进行放大,因混有杂波,需要对信号进行滤波、检波、放大处理。
电磁检测电路如图3所示。其中IN1、IN2为信号输入端口,OUT1、OUT2为信号输出端口,输出是经滤波、检波、放大处理后的电磁信号。
3)超声波检测
采用HC-SR04超声波模块作为检测赛道上障碍物的传感器。HC-SR04超声波模块是利用已知的超声波在空气中的传播速度,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出智能车到障碍物的实际距离 [4] 。
2.3 电机控制
1)速度检测模块
采用欧姆龙500线编码器对电机进行测速,该编码器的分辨率为500 P/R,通过正交解码获取速度检测模块的速度信号,其误差满足对智能车转速的控制要求 [5] 。
2)驱动模块
采用S-D5舵机作为智能车的转向控制环节中的执行机构。S-D5舵机使用简单,便捷功能强大,可直接由控制单元的输出口控制 [6] 。
驱动电路采用BTN7971芯片来设计电路。采用经典的H桥控制电路,受两个使能端和两个PWM控制端控制,通过使能端变换电机中电流方向,使电机达到正反转的目的。此电路与L298N驱动电路相比具有结构简单、稳定性好、散热效果好等优点。电机驱动电路如图4所示。
2.4 无线调试模块
无线调试模块主要用于显示车模动态运行状态及各控制参数的变化。NRF2401+模块把单片机采集的图像和各种赛道信息以数据包的形式向上位机发送,同时可以接受上位机发送的遥控控制信号等信息,与传统的蓝牙模块相比具有传输速度快的优点 [7] 。同时具有极低电流消耗的优点,当处于工作模式时电流消耗为9 mA,掉电模式和待机模式下电流消耗更低。
3 软件设计

智能车混合控制系统的软件设计通过状态函数切换在控制策略上,运用图像识别为主,电磁检测和超声波检测为辅的控制方式,较单一控制方式提高了智能车系统的准确性,使得各模块互补,实现了智能车系统的最优控制。
3.1 图像识别
1)边缘提取
通过图像识别得到像素120×160的图像,在前五行边线采用边缘扫描的方法提取,五行以后的边线利用的方式实现对智能车运行模式的控制,所实现的功能有:信息采集、模式识别、模式选择速度和方向控制。
通过图像识别、电磁检测、超声波检测等技术获取赛道和车辆信息。根据获取的信息识别车辆目前运行模式,并选择针对各种路况的运行模式,实现对状态函数的切换,改变智能车的运行状态。系统的程序流程图如图5所示。边缘跟踪方法,并考虑到边线丢失情况对赛道边线提取。跟踪边缘检测法较传统的边缘检测法运算速度快,抗干扰能力强,并且可以滤除十字交叉和三角黑区的干扰。

2)中线提取
在边线不丢失的情况下采用中点法求取赛道中线,当出现边线丢失情况,依据边线不丢失的最后一行的中线为基准对剩余的中线采用平移的方法来补充,若一条边界全部消失时,则以上一幅图像中线为基准进行平移。这种中线求解方法有效的解决了平均法的中线失真情况,提高了中线计算的准确性。
3.2特殊元素识别
1)圆环
根据圆环元素的图像的突变性和不对称性区别圆环和交叉路口。在圆环元素内实行分段控制、嵌套控制方式提高特殊元素的识别效率,实现对智能车的精确控制。
2)路障
当车辆行驶时,在赛道中间出现一处障碍物且有一定的通过空间,进入避障模式跟随赛道边缘行驶。当障碍物消失时,切换正常行驶模式。
3)斑马线
为了避免发车时停车和中途停车现象,在原有基础上增加判断条件。通过检测特殊元素的次数来判断车体在赛道上的进程,当特殊元素次数小于规定数,此期间的任何停车指令都作为伪指令屏蔽。
4)断路
当车辆行驶时若道路突然消失且超声波检测模块判断前方无障碍,则前方则可认为是短路,这时切换到电磁引导方式,根据电磁量对智能车进行控制。
5)横断路障
当赛车行驶时若前方道路突然截止且通过超声波检测模块判断前方存在障碍,这时切换到避障模式,当顺利通过横断路障时恢复正常行驶模式。
3.3 速度控制
智能车车模选用直流电机,额定电压为7.2 V。选用编码器测量实际速度值,与设定速度值进行比较,形成闭环负反馈速度控制回路 [1] 。智能车的速度控制需要考虑赛道的曲率、特殊元素等问题,其控制效果直接影响车体的灵敏度。采用分段的模糊PID控制算法控制车速,可根据赛道的情况实现速度的实时控制。起跑时快速升速,赛道曲率变大时要快速降速,避免冲出赛道,曲率变小时恢复到原有速度,特殊元素的速度采用分段控制。为实现速度的随动变化以适应多变的运行环境,可根据赛道中线斜率控制速度,其次对舵机打角限幅可有效避免出现车身抖动。通过以上措施可实现速度的最优控制,在保证系统稳定性的前提下提高智能车的平均速度。

3.4 方向控制
根据车辆和赛道中心的偏差量和中心线的变化趋势,结合此刻的舵机角度,对舵机进行方向闭环PID调节,减小智能车的位置偏差,实现混合控制系统对智能车方向的控制 [8] 。
4 系统调试
通过对程序的编译调试,以及对智能车速度、方向两大模块的控制参数进行调整之后,在37.5 m的赛道上进行调试,经过多次调试后得到试验结果如表1所示。表中共记录10组数据,每跑5次为1组数据,速度单位m/s,0表示冲出赛道。通过测量数据可以看出,所设计的混合控制系统能够使智能车在赛道上快速运行,且稳定性较好,这表明采用的控制方案合理,参数选择恰当,各硬件设计合理。
5 结论
该文章针对智能车的混合控制系统,以MK60FX512Q15单片机为核心控制芯片,通过对智能车整体方案、硬件电路、控制算法等几个方面进行设计,采用图像识别为主电磁检测和超声波检测为辅的多种传感器混合控制,解决了采用单一传感器的智能车系统可靠性低和准确性不足的问题,同时提高了智能车的运行的速度和精确度,使智能车系统更加稳定,并以较为理想的速度在赛道上运行,对于混合控制智能车的研究具有一定的参考和借鉴作用。
参考文献
[1] 李延斌, 牛雷, 佟贺. 基于GPS的智能车自动驾驶系统的研制[J]. 电子产品世界, 2018(11):61-63.
[2] 许苑丰, 郭泽豪, 刘智聪. 一种智能循迹小车设计方案[J]. 电子产品世界, 2013(11):47-49.
[3] 杨建姣, 朱凤武, 齐迹. 基于K60电磁循迹智能车系统控制策略的设计[J]. 安徽电子信息职业技术学院学报,2016, 15(2).
[4] 杨萍, 侯静茹, 曹强. 基于单片机的智能车图像处理与道路识别算法研究[J]. 机械制造, 2017(1).
[5] 朱阳, 王伟成, 王民慧. 基于电磁学的智能车路径识别与跟踪算法研究[J]. 传感器世界, 2014, 20(3):39-43.
[6] 李军, 申俊泽. 超声测距模块HC—SR04的超声波测距仪设计[J]. 单片机与嵌入式系统应用, 2011, 11(10).
[7] 孙肖林, 花怀海, 杨焜, et al. 信标系统及智能车硬件系统的设计研究[J]. 电子世界, 2017(11).
[8] 葛俊杰, 何志琴, 吴逊. 智能车图像采集及优化处理的研究[J]. 电子世界, 2018(16).
作者简介:
梁家泰,男,山东科技大学机电工程系电气工程与智能控制专业学生。
程丽平,女,通讯作者,山东济宁人,山东科技大学机电工程系讲师。
本文来源于科技期刊《电子产品世界》2019年第8期第54页,欢迎您写论文时引用,并注明出处

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码