FPGA重点知识13条,助你构建完整“逻辑观”之二
异步时钟同步化
通过双触发器接口,异步信号输入总是无法满足数据的建立保持时间,所以建议大家把所有异步输入都先经过双触发器进行同步化。如图所示,时钟域clk_s传给时钟域clk_d的数据经过了双触发器的同步处理,相同的,时钟域clk_d经双触发器传给时钟域clk_s的数据
通过高频时钟同步化,当在单个系统中有两个或两个以上非同源时钟的时候,数据的建立和保持时间很难得到保证,我们将面临复杂的时间问题,最好的方法是将所有非同源时钟同步化:选用一个频率是它们的时钟频率公倍数的高频主时钟将他们进行同步。
假设系统有两个不同源时钟,一个为3MHz,一个为5MHz,不同的触发器使用不同的时钟。为了系统稳定,假设我们引入一个20MHz时钟。
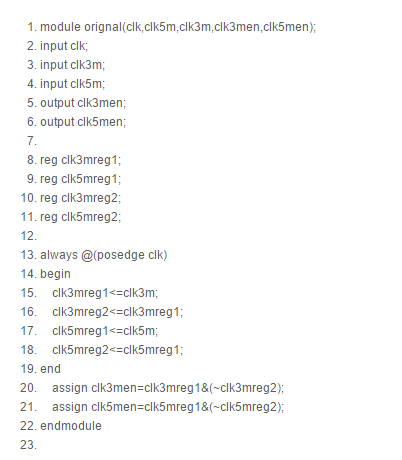
用modelsim仿真后得到的时序图如图所示

9、如何确定时序约束数值
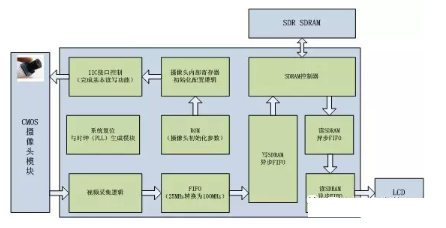
FPGA工程的功能框图如图所示。上电初始,FPGA需要通过IIC接口协议对摄像头模块进行寄存器初始化配置。这个初始化的基本参数,如初始化地址和数据存储在一个预先配置好的FPGA内嵌ROM中。在初始化配置完成后,摄像头就能够持续输出RGB标准的视频数据流,FPGA通过对其相应的时钟、行频和场频进行检测,从而一帧一帧的实时采集图像数据。
采集到的视频数据先通过一个FIFO,将原本25MHz频率下同步的数据流转换到100MHz频率下。接着讲这个数据再送入写SDRAM缓存的FIFO中,最终这个FIFO每满160个数据就会将其写入SDRAM的相应地址中。在另一侧,使用另一个异步FIFO将SDRAM缓存的图像数据送个LCD驱动模块。LCD驱动模块不断的读出新的现实图像,并且驱动3.5寸液晶屏工作。
由于这个工程是移植过来的,SDRAM的时序约束已经添加好并且很好的收敛了。但是,新增加的CMOS sensor的接口也需要做相应的时序约束。下面我们就来探讨下它的时序该如何做约束。
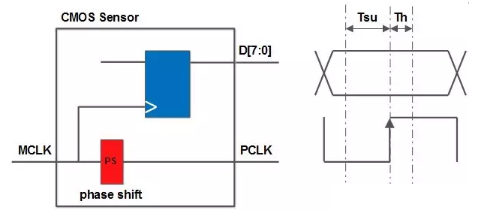
先看看CMOS Sensor的datasheet中提供的时序波形和相应的建立、保持时间要求。波形如图所示。
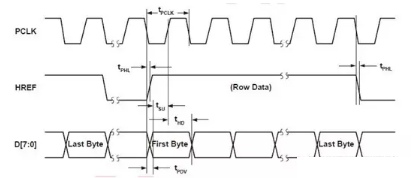
波形中出现的时间参数定义如下表所示。
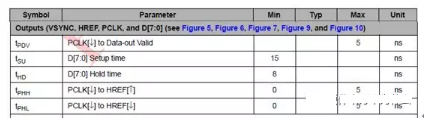
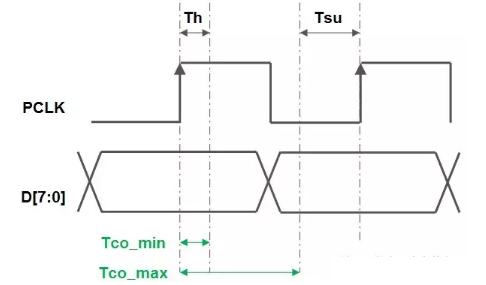
我们可以简单分析下这个datasheet中提供的时序波形和参数提供了一些什么样的有用信息。我们重点关注PCLK和D[7:0]的关系,HREF其实也可以归类到D[7:0]中一起分析,他们的时序关系基本是一致的(如果存在偏差,也可以忽略不计)。这个波形实际上表达的是从Sensor的芯片封装管脚上输出的PCLK和D[7:0]的关系。而在理想状况下,经过PCB走线将这组信号连接到其他的芯片上(如CPU或FPGA),若尽可能保持走线长度,在其他芯片的管脚上,PCLK和D[7:0]的关系基本还是不变的。那么,对于采集端来说,用PCLK的上升沿去锁存D[7:0]就变得理所当然了。而对于FPGA而言,从它的管脚到寄存器传输路径上总归是有延时存在的,那么PCLK和D[7:0]之间肯定不会是理想的对齐关系。而我们现在关心的是,相对于理想的对齐关系,PCLK和D[7:0]之间可以存在多大的相位偏差(最终可能会以一个延时时间范围来表示)。在时序图中,Tsu和Th虽然是PCLK和D[7:0]在Sensor内部必须保证的建立时间和保持时间关系,但它同样是Sensor的输出管脚上,必须得到保证的基本时序关系。因此,我们可以认为:理想相位关系情况下,PCLK上升沿之前的Tsu时间(即15ns)到上升沿后的Th时间(即8ns)内,D[7:0]是稳定不变的。同样的,理想情况下,PCLK的上升沿处于D[7:0]两次数据变化的中央。换句话说,在D[7:0]保持当前状态的情况下,PCLK上升沿实际上在理想位置的Tsu时间和Th时间内都是允许的。请大家记住这一点,下面我们需要利用这个信息对在FPGA内部的PCLK和D[7:0]信号进行时序约束。
OK,明确了PCLK和D[7:0]之间应该保持的关系后,我们再来看看他们从CMOS Sensor的管脚输出后,到最终在FPGA内部的寄存器进行采样锁存,这整个路径上的各种“艰难险阻”(延时)。
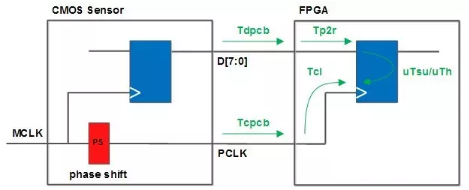
在这个路径分析中,我们不去考虑CMOS Sensor内部的时序关系,我们只关心它的输出管脚上的信号。先看时钟PCLK的路径延时,在PCB上的走线延时为Tcpcb,在FPGA内部,从进入FPGA的管脚到寄存器的时钟输入端口的延时为Tcl。再看数据D[7:0]的延时,在PCB上的走线延时为Tdpcb,在FPGA内部的管脚到寄存器输入端口延时为Tp2r。而FPGA的寄存器同样有建立时间Tsu和保持时间Th要求,也必须在整个路径的传输时序中予以考虑。
另外,从前面的分析,我们得到了PCLK和D[7:0]之间应该满足的关系。那么,为了保证PCLK和D[7:0]稳定考虑的得到传输,我们可以得到这样一个基本的关系必须满足:
对于建立时间,有:
Launch edge + Tdpcb + Tp2r + Tsu < latch edge + Tcpcb + Tcl
对于保持时间,有:
Launch edge + Tdpcb + Tr2p < latch edge + Tcpcb + Tcl – Th
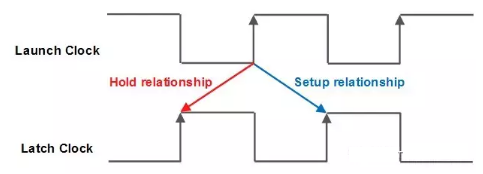
关于launch edge和latch edge,对于我们当前的设计,如下图所示。
在对这个FPGA的input接口的时序进行分析和约束之前,我们先来看看Altera官方是如何分析此类管脚的时序。
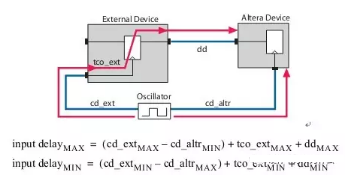
具体问题具体分析,我们当前的工程,状况和理想模型略有区别。实际上在上面这个模型的源寄存器端的很多信息都不用详细分析,因为我们获得的波形是来自于Sensor芯片的管脚。同理,我们可以得到input delay的计算公式如下。
Input max delay = (0 – Tcpcb_min) + Tco_max + Tdpcb_max
Input min delay = (0 – Tcpcb_max) + Tco_min + Tdpcb_min
在这两个公式中,参数Tco是前面我们还未曾提到的,下面我们就要分析下如何得到这个参数。Tco指的是理想情况下数据在源寄存器被源时钟锁存后,经过多长时间输入到管脚上。前面我们已经得到了PCLK和D[7:0]之间的关系,其实从已知的关系中,我们不难推断出Tco_max和Tco_min,如图所示。若PCLK的时钟周期为Tpclk,则:
Tco_max = Tpclk – Tsu
Tco_min = Th
在我们采样的CMOS Sensor图像中,PCLK频率为12.5MHz,即80ns。因此,我们可以计算到:
Tco_max = 80ns – 15ns = 65ns
Tco_min = 8ns
我们再看看PCB的走线情况,算算余下和PCB走线有关的延时。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
