小白必看!MEMS时钟振荡器在射频系统中的经典应用方案
前言:结合了MEMS和高分辨率锁相环电路的DCXO,能支持最小量化噪声设计的高速数字锁相环路和不受频率牵引范围影响的相位噪声,适合于应用到各种射频和通信系统中。
时钟振荡器和射频系统
时钟振荡器作为频率合成锁相环的参考信号源,广泛应用于各种射频系统的本地振荡器、时钟发生电路和通信同步电路(见图1)。
本地振荡器通过锁相环路倍频,产生射频混频电路所需要的本振驱动信号。参考时钟振荡器的频率准确度和稳定度决定了本振信号和射频收发器工作频率的准确度和稳 定度。
对频率精度要求不高的射频系统使用射频芯片内置振荡器电路与外接石英晶体谐振器组成参考时钟振荡器,这可以达到10-4~10-5的频率精度。对频 率误差和环境稳定性要求更高的射频通信系统需要独立的温补振荡器(TCXO)或频率可以微调的牵引温补振荡器(VC-TCXO)来达到10-6~10-7 精度等级。
恒温振荡器(OCXO)隔离了外部温度对振荡器的影响,使频率精度达到了10-8~10-9,能满足无线基站和高容量光纤传输网络节点的时间和频率基准要求。
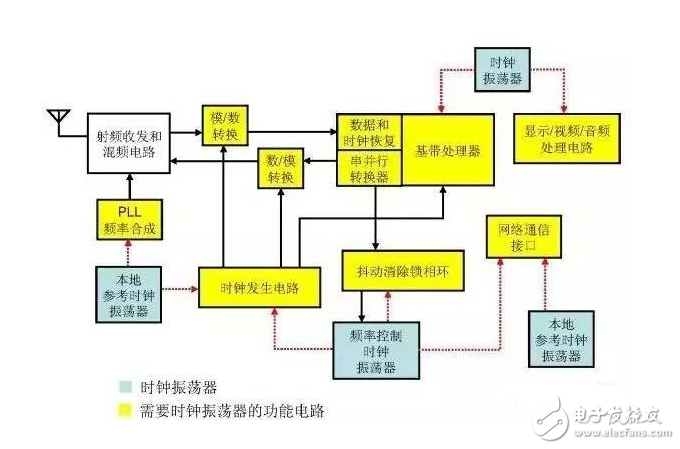
图1:时钟振荡器在射频系统中的应用
射频系统的时钟发生电路可提供数模和模数转换电路的取样时钟、基带数字信号处理器时钟、串行数据和时钟恢复电路的本地时钟。作为时钟发生电路的参考源,时钟振荡器的相位噪声和抖动性能,对模数信号转换的信噪比和数据传输误码率和恢复时钟的抖动都有重要影响。
射频系统的通信同步和抖动清除电路也是时钟振荡器的重要应用。经过无线或有线信号传输和时钟恢复过程,受信道噪声的影响,系统时钟的相位噪声和抖动会增加。 抖动清除电路应用窄带锁相环路和具有低相位噪声特性的牵引振荡器(VCXO)对系统时钟相位噪声进行过滤,可获得低抖动的时钟输出。
全硅MEMS时钟振荡器的频率稳定性和相位噪声性能在最近几年取得了突破性的进展。MEMS振荡器也展现了优异的环境稳定性(全温度、冲击、振动、电磁干 扰、电源噪声)和器件可靠性。
在架构上,全硅MEMS时钟振荡器结合了固定频率的MEMS谐振器和提供温度补偿和频率合成功能的、具有高分辨率的、分数N锁相环电路。基于这一架构已经 开发出各种不同类别的时钟振荡器—从单端和差分信号输出的标准振荡器、TCXO、VC-TCXO、VCXO到数字控制振荡器(DCXO)。
本文介绍基于MEMS的DCXO和传统牵引振荡器在抖动清除和通信同步锁相环路应用中的比较。并以实例说明如何应用高性能DCXO和FPGA来设计一个简洁的、全数字化的抖动清除锁相环电路。
频率控制方法
振荡器可通过直接牵引频率或使用高分辨率锁相环调整频率来实现频率控制。直接牵引频率的 VCXO用调整变容二极管电压来改变谐振电路电容,而直接牵引频率的DCXO通过可编程开关切换不同的谐振电容。
使用石英晶体谐振器的VCXO直接牵引频 率调整可以保持低相位噪声,但牵引范围被限制在约±200ppm。当系统应用需要更宽的频率牵引范围和与晶体振荡器相近的低噪声特性时,用户更倾向于选择 基于锁相环的MEMS控制振荡器架构,因为它们可以提供高达±1600ppm的牵引范围。
基于锁相环的MEMS VCXO内部电路包括一个模数转换器,将输入电压转换成数字信号,并驱动一个分数N锁相环来调节输出频率。该架构在牵引范围和VCO增益(Kv)的线性度 都优于直接牵引方式。
基于变容二极管的VCXO的VCO增益线性度仅为10%,而锁相环频率牵引的线性度可以达到0.1% 至1.0%。良好的线性度使得锁相环路设计简化并在整个工作范围内更加稳定。
然而,增加锁相环VCXO牵引范围通常会增加振 荡器输出的相位噪声,这是设计人员不愿意增加牵引范围的一个原因。DCXO可以解决这个问题。DCXO可以接收数字化的频率牵引信号,并直接驱动DCXO 内部全数字化的锁相环反馈分频器及调制器,不需要经过模数转换器,从而清除了近载波相位噪声的一个来源。
DCXO可以做到在增加频率牵引范围而不增加近载波相位噪声,并具有优于1%非常线性的增益响应,这可与最好的VCXO相媲美。DCXO提供许多可编程参数,因此,设计人员可以有更多Kv、输出频率、牵引范围参数的选择。
DCXO参数的选择
DCXO在实际运行环境下可用的绝对频率牵引范围(APR)是由振荡器电路的牵引范 围,频率稳定性和长期老化特性所决定的。
例如,一个±150ppm牵引范围,频率稳定性±10ppm和老化特性 ±5ppm的DCXO将有±135ppm的APR。如果振荡器的频率稳定性等级降到±50ppm, 则可用频率范围APR也减少到±95ppm。在满足系统规格前提下,设计人员可能需要考虑在所需振荡器稳定性和器件成本之间的权衡。
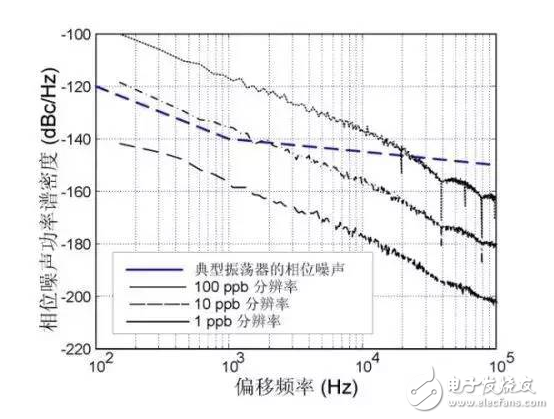
图2:频率分辨率量化引起的相位噪声,DCXO 10 MHz输出,频率更新速率每秒25000次
应用DCXO的数字锁相环路设计需要选择合适的频率分辨率、频率更新速率和更新延迟,以尽量减少频率更新引起的量化相位噪声。通过提高频率更新速率和频率分 辨率,量化噪声可以降至振荡器本征相位噪声水平以下。
图2是不同频率分辨率调整下的10MHz DCXO相位噪声, 频率更新速率每秒25,000次。图中数据显示,如果DCXO频率调整的分辨率高于10ppb,频率更新引入的量化噪声可降至低于振荡器本征相位噪声的水 平,使得频率调整不会影响性能。
频率更新速率也是非常重要的设计参数,因为更新速率太低会导致DCXO在相对长的时间累积较大的频率相位误差,从而导致较 大的频率调整数值和增加量化相位噪声。但是,对于一个能以1ppb分辨率调整的DCXO,即使是低至每秒2,500次的更新速率,也足以确保量化噪声不影响振荡器的性能(见图3)。
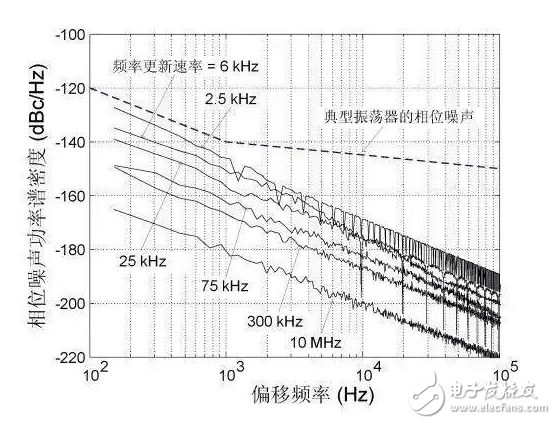
图3:频率更新速率对近载波相位噪声的影响,DCXO频率分辨率1 ppb
DCXO抖动清除电路实现
应用于抖动清除锁相环路的DCXO应具有足够高的频率更新速率,极高的频率分 辨率,低相位噪声性能和适合系统要求的频率牵引范围。图4是一个基于DCXO和FPGA的全数字锁相环路125MHz时钟的抖动清除电路。
该设计选择的 SiT3907 DCXO可以提供最高每秒25,000次的频率更新速率,1ppb的高频率分辨率,小于1 ps RMS(12kHz~20MHz)的积分相位抖动特性和最高达±1600ppm的线性牵引范围。
全数字锁相环电路包括输入时钟分频器,相位累加器、环路滤 波器,环路状态控制电路,可选的CIC滤波器,以及驱动DCXO芯片的串行通信接口。
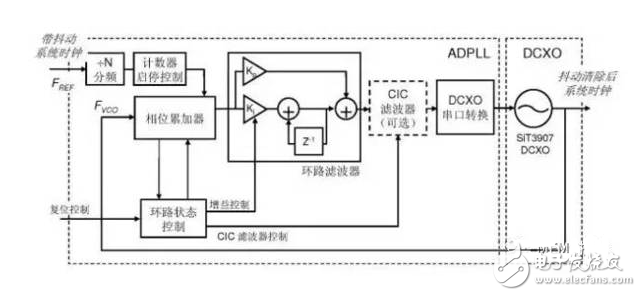
图4:基于DCXO和ADPLL的抖动清除电路框图
相位累加器是一个启停计数器,由反馈的DCXO时钟驱动。计数器周期的启动和结束由输入时钟分频脉冲触发。输入时钟预分频值N决定了相位累加器的采样率。
环路滤波器需要保持低带宽,一般不大于相位累加器采样率的十分之一。环路状态控制电路在检测到锁定状态之后可降低环路增益,进一步提高噪声抑制能力。
图4的数字锁相环电路还包括两个附加功能,可以降低相位噪声和抖动。第一个功能是环路状态控制电路的更新或复位信号,可最小化相位误差的积累。第二个功能是可选的CIC滤波器,可降低开环增益。没有打开CIC滤波器的开环增益H(s)为:
其中,N是系统时钟与相位比较器采样频率之间的比率。当环路滤波器增益在锁定过程中的两个值之间交替时,CIC滤波器可减轻增益变化对输出的影响。另外,调节增益Kp和Ki之间的比例可以增加稳定性、提高性能。
实验测量该设计的相位噪声、相位抖动和抖动衰减的有效性。测量数据显示对正弦信号调制抖动的衰减可高达60dB,并导致综合相位抖动显著降低。
图5显示抖动 清除电路对时钟信号的影响;从一个能观察到明显抖动的125MHz系统时钟开始,将宽带相位抖动从157 ps RMS降至3.5 ps RMS,产生了一个适合通信和网络应用的高性能、低抖动的输出时钟。
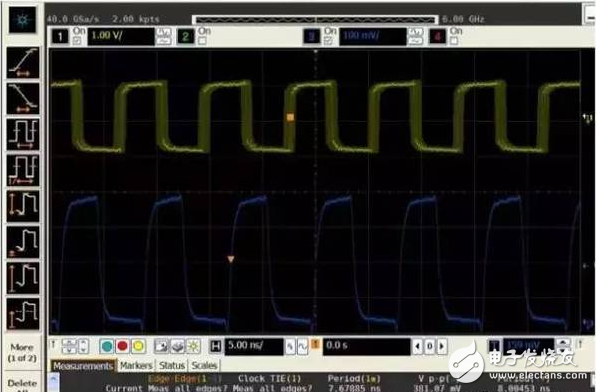
图5:比较带抖动的125 MHz系统时钟输入(黄色,顶部)与抖动清除后的输出时钟

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码