STM32之PWM最终版-注释明了一看就懂
#include "stm32f10x.h"
}
void GPIO_TimPWM(void)
{
}
void TIM3_Configuration(void)
{
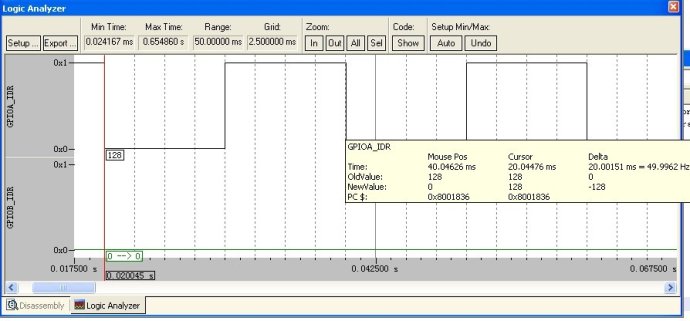
//假如我要产生50Hz占空比为50%的PWM波,方便控制舵机
//设置方法:
//系统默认时钟为72MHz,预分频71+1次,得到TIM3计数时钟为1MHz
//计数长度为19999+1=20000,可得PWM频率为1M/20000=50Hz
//计数长度为19999+1=20000,可得PWM频率为1M/20000=50Hz
//具体设置可参考上面的设置方法,简单明了!
}
int main(void)
{
}
利用Keil逻辑分析仪分分析PWM波形图:经过测试可以看出输出波形精度可靠!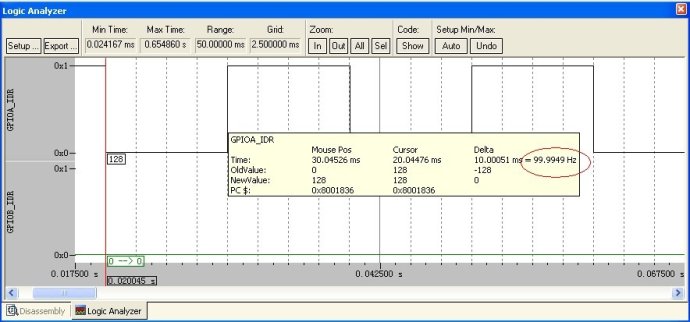
关键词: STM32PW

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码