ARM-Linux驱动--DM9000网卡驱动分析(三)
ARM-Linux驱动--DM9000网卡驱动分析(二)硬件平台:FL2440(s3c2440)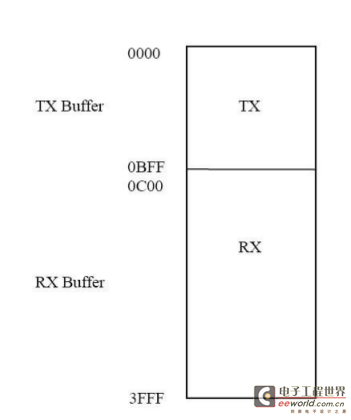
内核版本:2.6.35
主机平台:Ubuntu11.04
内核版本:2.6.39
交叉编译器:arm-linuc-gcc4.3.2
原创作品,转载请标明出处http://blog.csdn.net/yming0221/article/details/6615027
本文接上文
ARM-Linux驱动--DM9000网卡驱动分析(一)
ARM-Linux驱动--DM9000网卡驱动分析(二)
下面开始看网卡设备的打开、关闭函数和操作函数
view plainprint?
static const struct net_device_ops dm9000_netdev_ops = {
#ifdef CONFIG_NET_POLL_CONTROLLER
#endif
};
1、DM9000的打开函数
由于在函数alloc_netdev_mq()中分配net_device和网卡的私有数据是一起分配的,详见函数的实现
view plainprint?
struct net_device *alloc_netdev_mq(int sizeof_priv, const char *name,
{
...................
alloc_size = sizeof(struct net_device);
#ifdef CONFIG_RPS
..............
}
所以使用函数netdev_priv()函数返回的是网卡的私有数据的地址,函数的实现如下:
view plainprint?
static inline void *netdev_priv(const struct net_device *dev)
{
}
这样两者会同时生存和消失。
dm9000_open()函数
view plainprint?
static int
dm9000_open(struct net_device *dev)
{
}
2、网卡关闭函数
view plainprint?
static int
dm9000_stop(struct net_device *ndev)
{
}
下面是调用的dm9000_shutdown(ndev)函数,该函数的功能是复位phy,配置寄存器GPR位0为1,关闭dm9000电源,配置寄存器IMR位7为1,disable中断,配置寄存器RCR,disable接收
函数如下:
view plainprint?
static void
dm9000_shutdown(struct net_device *dev)
{
}
3、接下来了解一下数据的发送函数dm9000_start_xmit
上图可以看出DM9000的SRAM中地址0x0000到0x0BFF是TXBuffer,从0x0C00到0x3FFF是RXBuffer,包的有效数据必须提前放到TXBuffer缓冲区,使用端口命令来选择MWCMD寄存器。最后设置TXCR寄存器的bit[0]TXREQ来自动发送包。
发送包的步骤如下:
(1)检查存储器宽度,通过读取ISR的bit[7:6]来确定位数
(2)写数据到TXSRAM
(3)写传输长度到TXPLL和TXPLH寄存器
(4)设置TXCR的bit[0]TXREQ来发送包
view plainprint?
static int
dm9000_start_xmit(struct sk_buff *skb, struct net_device *dev)
{
}
上面函数调用下面的函数 dm9000_send_packet来发送数据
view plainprint?
static void dm9000_send_packet(struct net_device *dev,
{
}
5、下面看一下当一个数据包发送完成后的中断处理函数dm9000_tx_done
view plainprint?
static void dm9000_tx_done(struct net_device *dev, board_info_t *db)
{
}
关键词: ARMLinux驱动DM9000网卡驱

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码