联合收获机凹板间隙调节系统研究
编者按: 摘要:联合收获机凹板间隙的大小是影响联合收获机脱离质量的关键因素之一,本文设计了一款基于联合收获机的凹板结构,通过控制线性驱动器对凹板间隙进行自动调节的系统,实现了联合收获机凹板间隙自动调节,通过试验研究结果表明:该系统调节方便实用,且调节精度在5%以内。 引言 谷物联合收获机的作业性能指标,主要包括总损失率、破损率和含杂率等。脱粒与分离滚筒是谷物联合收获机的重要工作部件。脱粒与分离滚筒由高速旋转的滚筒和固定的弧型凹板配合,使谷物从滚筒与凹板之问通过,经脱粒元件的打击、揉搓、碾压和梳刷,通
unsignedintg_dutywidth =1000; //200(20%)-1000(97.6%);
///////////////////////////
////////InitPWM////////////
voidInitPWM(void)
{
RODIV3 = 0;
RODIV2 = 0;
RODIV1 = 1;
RODIV0 = 1;
TRISC6 = 0;
TRISC7 = 0;
T2CKPS1 = 1;
T2CKPS0 = 0;
TMR2ON = 1;
PR2 = g_period;
CCPR4L = (g_dutywidth>>2)&0x00ff;
DC4B1 = (g_dutywidth>>1)&0x01;
DC4B0 = g_dutywidth&0x001;
CCP4CON =CCP4CON|0X0F;
CCPR3L = (g_dutywidth>>2)&0x00ff;
DC3B1 = (g_dutywidth>>1)&0x01;
DC3B0 = g_dutywidth&0x001;
CCP3CON =CCP3CON|0X0F;
}
4 试验结果及分析
为了测试设计电路的可行性,对电路进行了输入输出实验。利用微控制器PIC18F25K80的PWM模块对驱动电路输入常用的1KHz、40%占空比的方波对电机进行控制。从波形图中可以看出,BTS7960驱动电路能够较好地跟踪输人信号的变化,不仅波形完整稳定,并且能够把单片机输出没有驱动能力5V驱动PWM信号放大至能够驱动电机的24V电压,能够用于线性驱动器的电机驱动,实现联合收获机凹板间隙的调节。
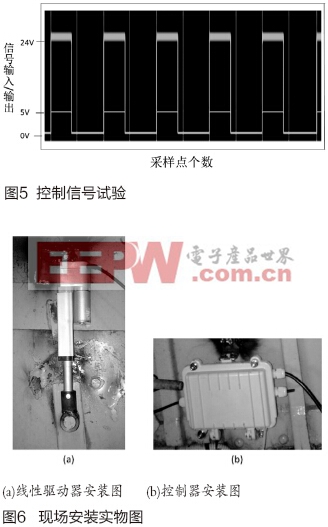
为了验证控制系统的可行性,将其安装在联合收获机上进行田间试验,其现场安装实物图如图6所示。经过多次试验结果显示其对凹板间隙的调节精度在5%以内。
5 结束语
本文设计的一款联合收获机凹板间隙自动调节系统,通过自带有CAN模块的PIC18F25K80作为微控制器,搭配TJA1050 CAN收发器,构成CAN总线节点,具有很高的性价比和可靠性,而且功耗低、布线简洁。完成了同步控制线性驱动器通讯设计要求,并且设计的基于BTS7960芯片的电机驱动电路,达到了精确控制线性驱动器的效果,同样达了试验要求,其控制精度达到5%以内。通过了试验室和室外试验的验证,该系统具有很好的实用性。
参考文献:
[1]李媛媛,孙曙光.凹板间隙对谷物联合收获机作业性能影响的试验研究[J].装备制造技术,2009,(3):3
[2]Microchip Technology Inc.PIC18F25K80 Data Sheet [EB/OL] http://ww1.microchip.com/downloads/cn/DeviceDoc/39977C
[3] BTS7960 high current PN half bridge。Infineon DataSheet.Revl.1.[Z].2004
[4]DATA SHEET. TJA1050 High-Speed CAN Transceiver[M]. Philips Semiconductors, 2001
[5]李真花,崔健.CAN总线轻松入门与实践[M]. 北京:北京航空航天大学出版社,2011

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码