基于激光传感器的智能车的坡道检测
根据以上传感器识别赛道的原理,可以把激光管和接收管放置在车模前侧的左边或右边,使发射的激光平行于赛道,如图2所示,还可以通过调整激光的作用距离来调整检测坡道提前量的大小。

2.2 软件实现
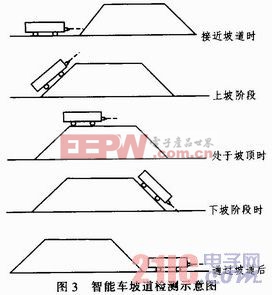
当车模前方没有坡道时,激光平行于赛道,此时,光线不会被反射,即接收管不会接收到光线,单片机收到的返回值为1。当车模靠近坡道到一定距离时,由于赛道的两侧是白色部分,激光管又置于车模的两侧,所以此时激光照射到赛道的白色部分,光线被反射,接收管接收到光线,单片机收到的返回值为0。当车模处于爬坡状态和坡顶时,光线照射不到赛道,不会被反射,接收管不会接收到光线,单片机收到的返回值为1。当车模处于下坡阶段时,光线照射到赛道的白色部分,发生反射,接收管接收到光线,单片机收到的返回值变为0。当车模通过坡道后,光线又照射不到赛道,不会被反射,接收管不会接收到光线,单片机收到的返回值为1。具体过程如图3所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码