基于单片机和Modbus协议的停车器控制系统
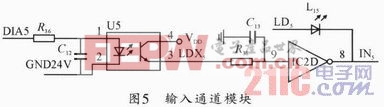
通过输入模块,位置传感器将转辙机的行程信号输入到控制单片机中。先经过滤波以减小干扰,然后经过光电隔离以保护主控电路,最后通过输入到单片机端口上,通过发光二极管显示输入的电平高低情况,如图5所示。
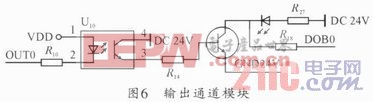
现场主控制模块单片机输出的TTL逻辑电平通过光电隔离后,经过三极管放大的输出,经过接24 V电源的上拉电阻和显示用的发光二极管,输出电压以控制继电器,选择正反两个连线方案,进而实现对转辙机电动机的控制,实现前进、后退和停止,如图6所示。
3 软件设计
(1)主机程序
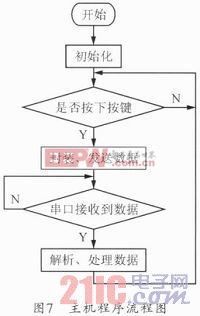
主机程序流程图如图7所示。系统的初始化包括打开串口和设置串口。程序先检测是否有按键按下,如果有按键按下,则根据按键封装相应的数据并发送,否则继续检测是否有按键按下。然后检测串口是否收到来自从机的数据,如果有收到数据,则解析该数据并做相关处理,显示出来,然后继续检测是否有按键按下,否则继续检测串口是否有收到数据。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码