利用传感器检测智能车加速度及速度全面解析方案
1 引言
智能汽车是汽车电子、人工智能、模式识别、自动控制、计算机、机械多个学科领域的交叉综合的体现,具有重要的应用价值。智能寻迹车是基于飞思卡尔MC9S12DGl28单片机开发实现的,该系统采用CCD传感器识别道路中央黑色的引导线,利用传感器检测智能车的加速度和速度,在此基础上利用合理的算法控制智能车运动,从而实现快速稳定的寻迹行驶。
2 硬件系统设计
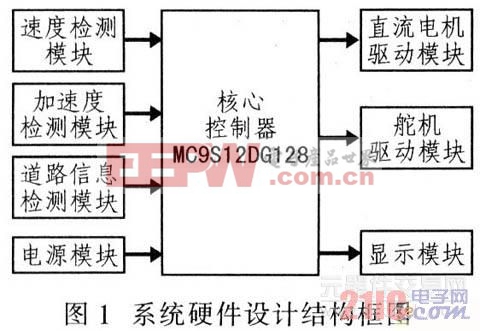
该系统硬件设计主要由MC9S12DGl28控制核心、电源管理模块、直流电机驱动模块、转向舵机控制模块、道路信息检测模块、速度检测模块和加速度检测模块等组成,其结构框图如图1所示。
2.1 主控制器模块
智能车的控制核心为MC9S12DGl28。MC9S12DGl28是飞思卡尔公司生产的一款16位单片机,片内总线时钟可达到25 MHz;片内资源包括8 K RAM、128 K Flash、2 K EEP-ROM;SCI,SPI,PWM和串行接口模块;脉宽调制模块(PWM)可设置成4路8位或2路16位,逻辑时钟选择频率脉宽:2个8路10位A/D转换器,增强型捕捉定时器并支持背景调试模式等。
2.2 电源管理模块
该系统设计采用7.2 V/1 800 mA镍镉电池供电,7.2 V电压经过BMlll7—5稳压后得到5 V电压,向单片机、红外传感器和加速度传感器供电。5 V电压经MAX8715升压后得到12 V电压,向CCD图像传感器供电:7.2 V电压经二极管降压得到约6 V的电压来驱动舵机;电机驱动器MC33886则直接由电源供电。
2.3 道路信息检测模块
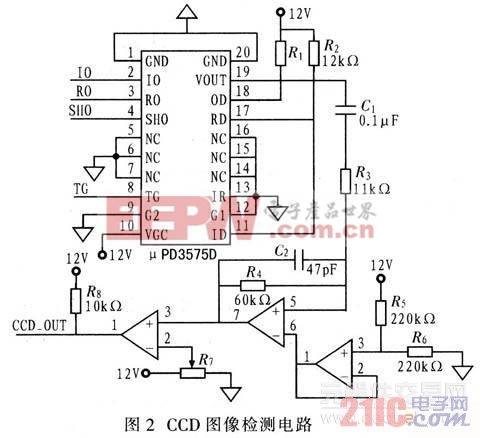
该系统设计使用NEC公司的线阵CCDμPD3575D检测赛道信息。该器件可工作在5 V驱动(脉冲)和12 V电源条件下。μPD3575D的驱动需要4路脉冲,分别为转移栅时钟φIO、复位时钟φRD、采样保持时钟φSHO和传输门时钟φTG。系统设计由外围电路直接产生CCD驱动时钟,采用计数器和触发器专门设计时序电路,产生转移栅时钟φIO、复位时钟φRO、采样保持时钟φSHO,单片机只需产生一个帧同步信号(传输门信号φTG)与外围时序电路保持同步即可。μPD3575D输出的是模拟信号,将采集图像传输至单片机,一般需对μPD3575D输出信号进行A/D转换,考虑到设计实际上只需要区分黑色和白色,μPD3575D对这两种输出信号差异较大,因此,将μPD3575D输出信号放大后直接使用一个比较器对信号二值化处理,如图2所示。由单片机检测二值信号的跳变时间,便可计算出黑线位置,从而进一步缩短单片机在CCD上所消耗的时间。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
