基于AT89C2051智能汽车防撞报警器设计
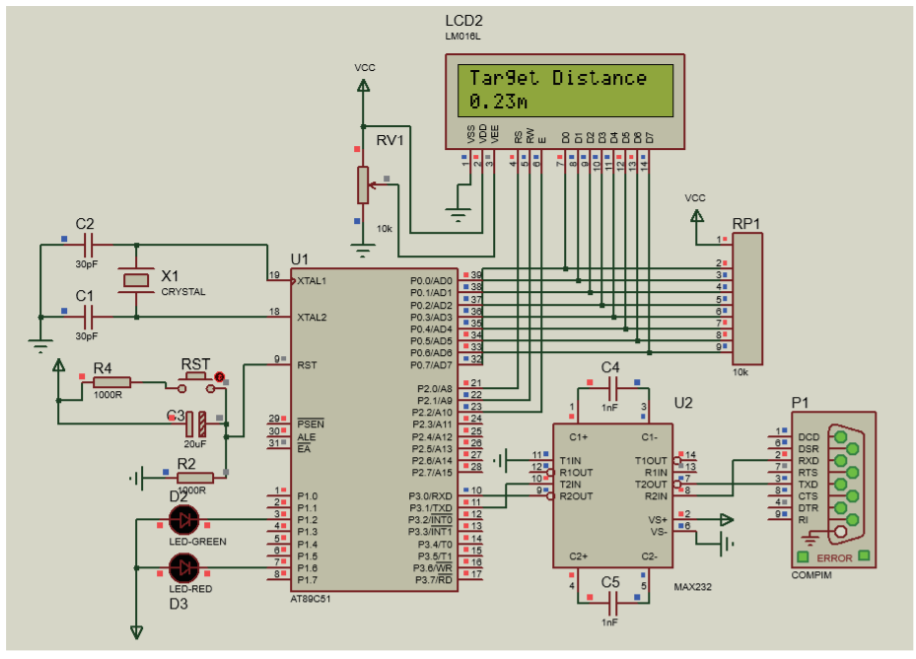
控制器AT89C2051主要完成程序的执行、数据的处理和对外部电路的实时控制。内部定时器T0工作在定时方式,T0在超声波发射时开始计数,当P3.2引脚收到回波后,停止计数,T0所计时间即为超声波往返传输时间,单片机对该数据进行处理,即可测出距离。内部定时器T1工作在计数方式,由P3.5引脚输入的脉冲信号控制T1计数,由T1所计数值确定汽车的转速。
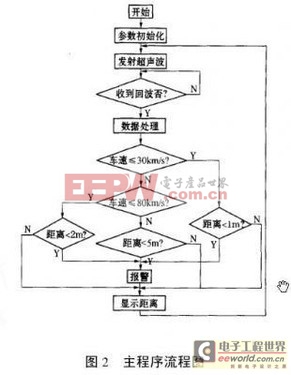
单片机根据所测距离和车速进行比较,判断是否驱动报警电路报警,如设定:当车速小于等于30km/s时,安全距离应大于等于1m;当车速小于等于80km/s时,安全距离应大于等于2m;当车速大于80km/s时,安全距离应大于等于5m。
5 软件设计
本装置的控制软件要完成系统的初始化,控制触发脉冲信号的发射与接收,根据定时时间计算障碍物的距离,根据计数频率计算汽车车速,判断所测距离是否在车速所对应的安全范围内,并根据计算和判断结果产生BCD码和相应频率的脉冲信号,以驱动显示电路和发声电路。实现整个系统功能的主流程图如图2所示。
6 结束语
本文介绍的汽车报警器,利用单片机AT89C2051作为报警装置的控制器,能充分发挥AT89C2051的数据处理和实时控制功能,使系统工作于最佳状态,提高系统的灵敏度。该报警器基于单片机设计,从而具有体积小、使用方便的特点。若将安全距离设为0.5m,就可作为汽车倒车报警器,提高汽车倒车时的安全性。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码