多智能体合作通讯的设计
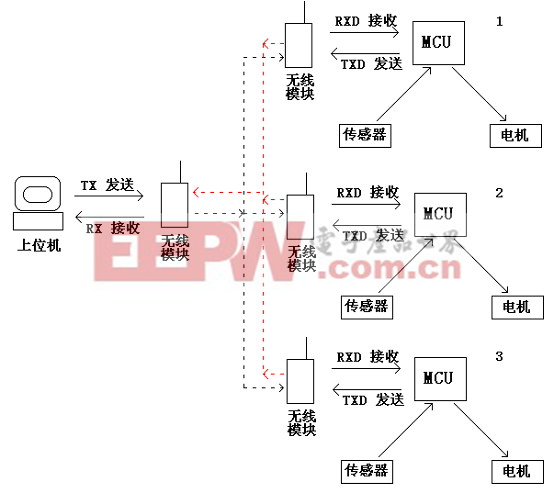
总体框图:
设计要求:
设计一套符合上图的上层通讯协议,可以完成上图所有的任务。
OSI七层参考模型
应用层
表示层
会话层
传输层
网络层
数据链路层
物理层
按照OSI7层协议模型,在此数据链路层和物理层已经通过异步串行通讯协议UART定义,所设计的上层通讯协议是基于UART的。
设计思路与框架:
由于数据链路层与物理层都已经定义,所以还须定义网络层,传输层,会话层,表示层,应用层。
协议基本结构:
OSI七层模型多智能体协议模型功能说明
应用层控制层马达控制,A/D转换
表示层命令,数据格式协议
会话层规则层从机发言顺序协议
传输层
网络层主从机地址协议
数据链路层通讯层UART串口通讯协议
物理层
我将所构思的协议划分为三层,既控制层,规则层和通讯层。控制层相对应的是OSI中的应用层和表示层,其作用是理解和执行命令,采集环境变量并传回数据。规则层相对应的是OSI中的会话层,传输层和网络层,其作用是确保网络中没有人同时发言,确保从数据到达正确的目的地。通讯层相当于OSI中的物理层和数据链路层,在这里使用了UART串口通讯协议,通过此确保字符被正确地发送和接收。
1.通讯层
通讯层是三层中最底层的一层。它是上面两层协议的基础。在这里我们使用UART串口通讯协议。协议的具体细节在VISUALBASIC和BASCOMAVR中都已经制定好,只须采用现成的函数即可实现通讯层的数据链路层。
我们通过上海桑博电子科技有限公司生产的STR-18型微功率无线通讯模块来实现通讯层中的物理层。它通过无线方式来传输数据,使机器人可以灵活移动。
硬件连接方法为所有的子机RXD,TXD都并联,上位机的RXD与所有子机的TXD连接,上位机的TXD与所有子机的RXD连接。这样,上位机可以与所有的子机通讯,但是子机与子机之间不能直接通讯,需要经过上位机中转后才能通讯,并且同时只能有一个子机发言。
2.规则层
规则层对应了会话层,传输层和网络层三层,然而我们只需要实现网络层和会话层。因为机器人为单进程系统,无须考虑将数据分发到指定进程的问题。
网络层对机器人的地址作出了规定。上位机的地址为OxOO,子机的地址为0x01至OxFF。地址码大小为00至FF,即支持255台子机和1台上位机。
网络层把数据包的结构定义为:第一个字节是目的地址码,第二个字节为发送机地址码,最后一个字节为结束标志Chr(13),中间为数据。数据中不可出现Chr(13),否则程序会误认为数据包已经接收完成。
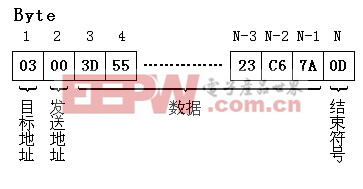
数据包结构示意图
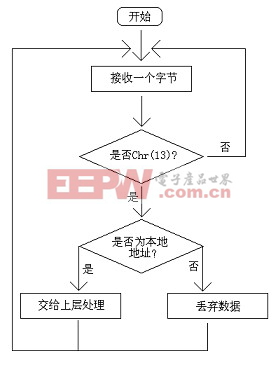
数据包接收完成,即接收到Chr(13)后,开始分析数据包。首先检查数据包的第一个字节,若该字节与自身的地址码相符,则继续处理该数据包;若不同,则丢弃该数据包。
确认该数据包是属于自己的以后,再把数据和发送地址交给控制层协议处理。
在子机和子机之间也要通讯的时候,上位机充当了一个数据中转站的角色。当上位机接收到目标地址不为0x00的数据包时,则通过TXD把该数据包发送出去。
由于所有子机的TXD在同一条线上,如果有两台子机同时发送数据就会导致上位机无法正确接受数据,所以我们要通过协议来确保每时每刻最多只有一台子机在发送数据。这就是会话层在此要解决的主要问题。
这里使用了主从结构,从机不主动发送数据,一切由上位机控制。当上位机想让A机和B机发送数据时,上位机就对大家说“A,向我汇报情况”,然后A机说“我是A机,一切正常”,A说好后,上位机又说“B,向我汇报情况”,然后B机说“我是B机,一切正常”,通讯结束。
如果上位机说好“A,向我汇报情况”后,A机超过100MS没有反映,则再次重复。若A机超过500MS没有反映,则上位机就认为A机不正常,跳过A机询问B机。
由于在数据包头已经包含了目标地址码,所以在命令子机发送数据时命令中无须再出现地址码。我规定,“TALK*”为让子机发送数据的命令。
上位机每次请求子机发言,都必须是在上一次通讯结束后才能开始下一次通讯。否则会引起总线冲突。同时询问的次数必须考虑传输的波特率与子机的计算速度,否则会导致整体效率低下。
3.控制层
控制层为上层协议,主要任务是与环境,人交互和控制机械部分完成实际的任务。它是直接面对我们的一层协议。
控制层要完成的任务为:按命令控制马达与舵机,采集传感器数值并发送,采集人的决策或根据传回的数据自动作出决策,协调各机器人的运动和任务分配等。
我规定,一条命令由两个字节组成。第一个字节为设备代码,第二个字节为状态代码。每个数据包可以包含多条命令,由于设备代码只有256个,所以每个数据包的长度最多只有515字节,因此无须分割。
每个设备都有其自身独立的设备代码,并且设备状态对其有实际的意义。由于状态代码为0-255,所以每个设备最多只能有256种状态。因此PWM信号的精度最高只能为1/256。
当子机接收到了有效数据时,便将其第一条命令剥离,解释,执行,然后再把第二条命令剥离,解释,执行,直到全部命令都被剥离完。
上位机首先做出决策,例如“A往左,B往右”,然后分离为“A往左”和“B往右”,接着分离为“A的1号电机反转,2号电机正转”,“B的1号电机正转,2号电机反转”,最后分为2个数据包发送出去。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码