基于AVR单片机的自由立体显示背光控制系统
4 实验
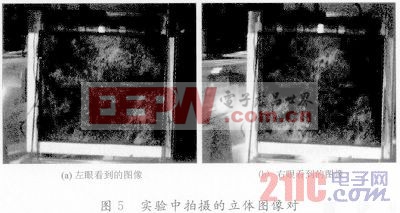
在实验中采用NASA的航拍视差图像对,观看距离490~550 mm,观看视角±30°以内。实际得到的图像如图5所示,其中图5(a)是观察者左眼看到的图像。图5(b)是观察者右眼看到的图像,由于这两幅图像存在视差,最终就会在大脑中融合成一幅具有立体感的图像。
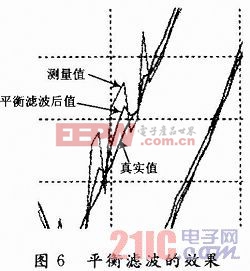
Kalman预测使得LED背光的刷新频率由25 Hz提高到50 Hz,跳动感有所减弱。此外,为了验证Kalman滤波算法的效果,手工标记了1 500帧图片中左右两眼的精确位置,单片机通过串口将滤波值以及1/2帧处的预测值回发给上位机。定义:
![]()
式中:△反映了与真实值的偏移程度。Kalman平衡滤波前,△1=25.56;滤波后,△2=20.45,检测偏差改善了19.99%,由图6可以直观地看出平衡Kalman滤波改善了定位的效果。
5 结语
本文介绍的自由立体显示系统只需要一对立体图片,就可以获得很好的立体效果。采用价格合理、性能优越的单片机控制系统,保证了性能与成本的兼顾。基于匀速运动模型的Kalman滤波器成功改善了系统的性能。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码