基于CAN通信的卡车语音报警器的设计
位定时主要用于定义CAN总线通信的速率,对同一总线上的各个节点应定义同一种通信速率,否则无法进行通信联系。CAN控制器的总线工作频率计算公式如下:

式中:BRP为系统预分频因子,它在TSEG1域中的取值范围为0~63;TSEG1、TSEG2的值由位定时寄存器编程决定,并满足1≤TSEG1≤7, 2≤TSEG2≤15。报警器中位定时的设置,定义通信频率为250KB/s。设定DSC=BRP=1,TSEG1+TSEG2=5,系统晶振频率为 8MHz,即XTAL=8MHz,CAN通信频率由上式计算得到250KB/s。
最后位定时设置结果为:BRP=1,TSEG2=2,TSEG1=3。

图2 语音报警系统结构
设计概述
该卡车语音报警系统的设计目标是:成本低;功能强大;适用于日常应用;能够应用于各类车辆。该系统可实现如下功能:利用CAN网络实现对卡车故障码的接收;二,通过识别CAN系统传过来的信号,并对信号进行处理得到相应的语音提示,通过与语音芯片的连接实现相应故障的语音播放报警。
该语音报警系统以摩托罗拉公司的MC68HC908GZ16处理器为核心,并利用其丰富的接口扩展使用了语音播放、CAN通信接口等外围模块,使产品设计更加人性化。MC68HC908GZ16处理器具有如下优点:
1.丰富的硬件资源
MC68HC908GZ16为闪存型MCU,内部拥有16K的FLASH存储空间和1K的RAM存储空间。内部拥有锁相环电路,能够在使用低速晶振的情况下使总线频率最高达到8MHz。同时拥有多达37个通用I/O口,可以方便地与其他外围设备相连接。
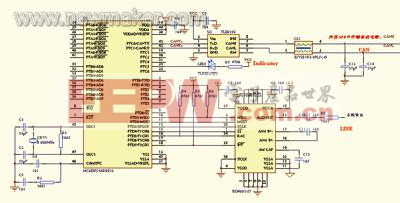
图3 卡车报警器电路原理图
2.极强的抗扰能力
内部集成了CAN控制器,利用CAN通信具有很强的抗干扰这一特点,保证了产品能够在恶劣环境条件下高效而稳定地运行。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码