基于S3C44B0X的移动机器人的应用研究
4 实验结果
实验是在室内进行的,场地面积12m×12m,绿色毛毯状物质贴于场地表层以防止打滑。路径规划采用基于栅格的导航算法²,机器人形状大小0.8m×0.8m×0.6m, 栅格尺度为机器人尺度为0.8m×0.8m,栅格的行数与列数均为15,栅格总数为15×15=225格。以积木和其它机器人为静止障碍物。移动机器人的运行轨迹如图4所示。图中浅灰色方框为障碍物,深灰色方框路线为机器人运动轨迹,起始点与目标点如下图4所标。实验结果表明,该机器人能够避开障碍物到达目标点,实验多次,位置误差在0~0.4m,具有可行性。
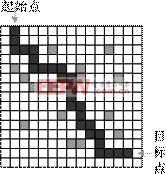
图4 机器人运动示意图
5 结论
本文作者的创新点是采用高性能ARM芯片S3C44B0X为主控制和单片机SPCE061A为辅助控制器相结合的方法对机器人进行控制,并引入嵌入式实时操作系统µC/OS-II完成机器人导航算法的实现以及对机器人多个任务进行合理规划和调度,以及保证机器人对未知环境的快速响应和保证整个系统的精度,实验证明了这种方法具有可行性。
该控制系统有丰富的硬件资源,传感器所获取的信息的处理也采用高性能单片机SPCE061A,为以后视觉传感器(CCD)的使用提供了硬件基础,该机器人占用主控制器的硬件也比较少,为以后系统的升级提供方便。也可以采用更先进的导航算法使 更加智能化。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
