基于CPLD的开放式四轴运动控制器的设计
作为运动控制的核心部件,运动控制器普遍采用16位或32位微控制器,其灵活的系统集成方式和高速的指令执行速度提高了运动控制性能、改善了控制系统的精度、增强了系统构成的灵活性。如DeltaTau公司的PMAC系列、MEI公司的XMP系列的产品,均采用了高速数据信号处理器(DSP)和现场可编程门阵列(FPGA)技术,一般可以控制1~8个轴。这些基于PC机总线的运行控制器,虽然因采用高性能微处理器在信息处理速度方面有较大的提高,并在实际应用中提供了灵活的接口,但在使用以及系统集成的时候,仍然有很多不便,如价格比较高、应用非常复杂等。并且在结构上是封闭的,只能针对某一类型的应用,控制策略单一,很难同时满足控制系统在多种应用场合中的要求,实际定制应用。
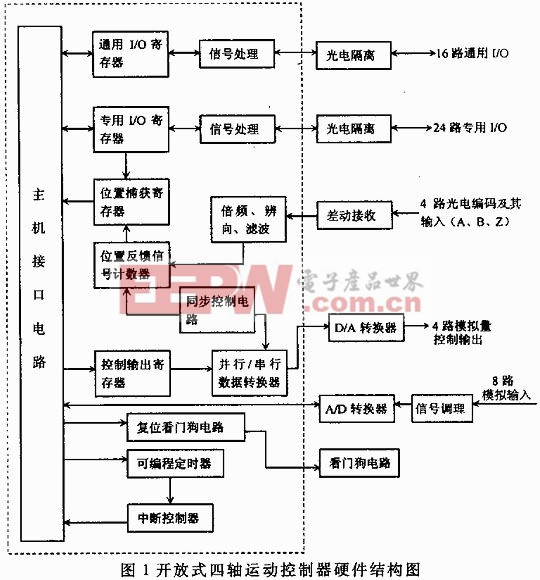
过去,受计算机处理能力的限制,高性能的运动控制技术需要在板处理器如单片机或DSP上实现,一般PC机中的微处理器很难同时完成如轨迹插补运算和伺服控制运算等任务。目前PC机微处理器已经采用了更先进的工艺技术,信息处理能力明显提高,可以满足高速实时运动控制的要求,硬件支持能力大在增强,并且PC机良好的软件开发环境使构造开放式运动控制平台成为功可能。本文提出了一种不采用在板处理器而以PC机微处理器为控制核心的开放式四轴运动控制器,该运动控制器采用ALTERA公司的复杂可编程门阵列(CPLD)EPF6016实现硬件管理功能,硬件的功能可以通过软件配置,而应用层的功能如运动轨迹规则和伺服控制等均由PC机完成。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码


