光电跟踪伺服系统中模糊控制器的设计与仿真
四、结果分析:
经过仿真,得到常规控制器阶跃响应曲线(图三)和带有二维模糊控制控制器的光电跟踪伺服系统(图四、图五)的阶跃响应曲线如下:
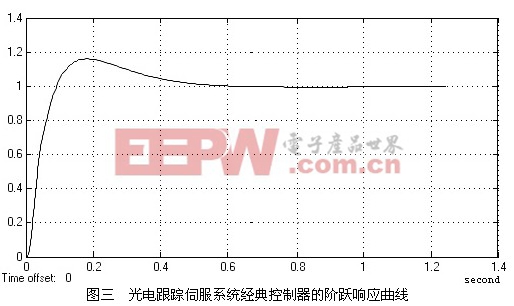
Fig.3 step response of classic control of opto-electronic tracking
servo system
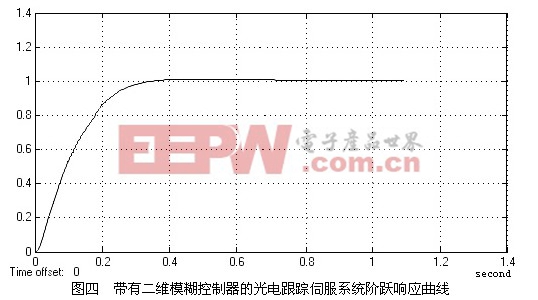
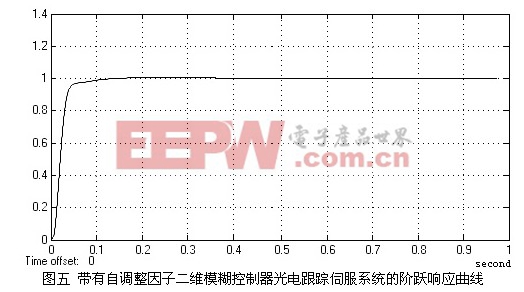
Fig.5 step response of opto-electronic tracking servo system with
self-tuning two-dimension fuzzy control
对比带有自调整因子的二维模糊控制器光电跟踪伺服系统(图五)、经典控制器和一般二维模糊控制器的阶跃响应曲线(如图三,图四)可以得出,自调整因子二维模糊控制器和经典控制器(它的超调较大、高于15%,调节时间以达到±5%为准大于0.4秒)和一般二维模糊控制器(它的超调为1.2%,调节时间以达到+-5%为准,约0.3秒)相比,它的超调量较小,为0.6%,调节时间以达到±5%为准,为0.04秒,仿真表明加入比例因子自调整二维模糊控制器的光电跟踪伺服系统具有更好的动态性能。
本文作者创新点:
本文中特别采用S-函数将光电跟踪伺服系统中两种控制器之间的切换和模糊控制器比例因子自调整集于一身,并通过同时对Ke、Kec、Ku三个二维模糊控制器因子的自调整改善了光电跟踪伺服系统的动态性能。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码