基于RBF神经网络的控制系统传感器故障诊断方法
2.2 确定基函数的宽度(误差σ)

式中:ai是以ci为中心的样本子集。
基函数中心和宽度参数确定后,隐含层执行的是一种固定不变的非线性变换,第i个隐节点输出定义为:
2.3 调节隐层单元到输出单元间的连接权
网络的目标函数为:

也就是总的误差函数。式中:y(xk)是相对于输入xk的实际输出;y(xk)是相对于xk的期望输出;N为训练样本集中的总样本数。对于RBFNN,参数的确定应能是网络在最小二乘意义下逼近所对应的映射关系,也就是使E达到最小。因此,这里利用梯度下降法修正网络隐含层到输出层的权值ω,使目标函数达到最小。

式中:η为学习率,取值为0~1之间的小数。根据上面式(6),式(7)最终可以确定权值叫的每步调整量:
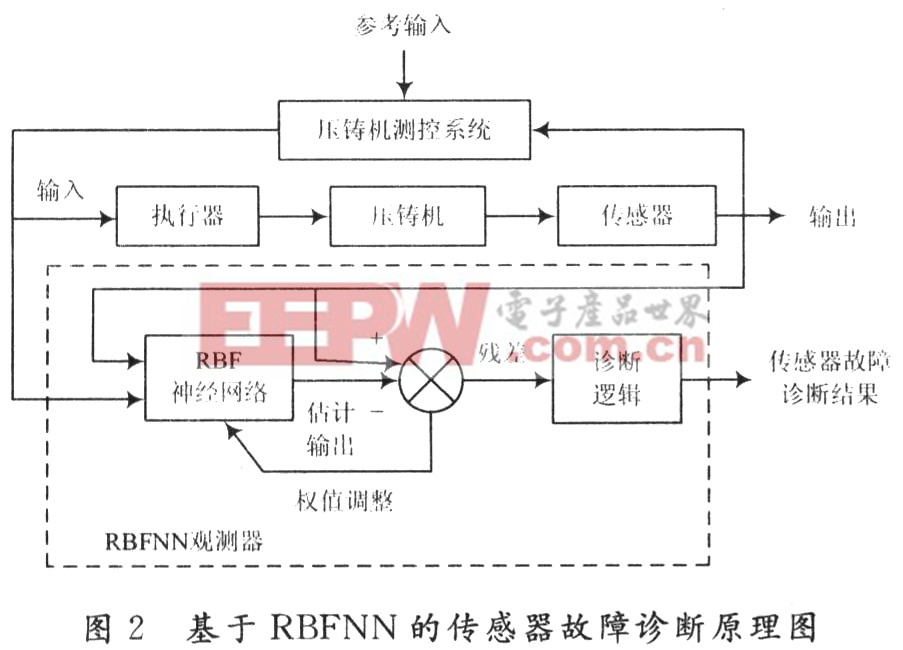
图2中虚线框所示部分即为RBFNN观测器原理。基本思想:通过正常情况下非线性系统的实际输入和传感器的输出学习系统的特性,用已经训练好的观测器的输出于实际系统的输出做比较,将两者之差做残差,再对残差进行分析、处理,得到故障信息,并利用残差信号对传感器故障原因进行诊断。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
