电容触摸传感的理论框架
考虑到美观、整洁和成本效益等方面的因素,触摸传感应用在包括消费类电子产品、家用电器等在内的许多电子产品中,正变得越来越流行。本文将讨论与电容触摸传感工作相关的基本概念,以及如何简便地实现电容触摸传感。
电容的相关物理性质
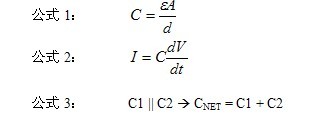
为了更好地理解在电容触摸传感应用的硬件、布线和软件开发中需要采取哪些措施,了解它内在的物理性质非常重要。控制它的是两个基本公式和一个常识。第一个公式(见公式1)用于求电容值,它说明如何根据极板模型使用面积、距离和材料属性来定义电容。第二个公式(见公式2)说明电容电压与电流的关系,并引入RC电路的充电速率(等于时间常数τ)。第三个公式(见公式3)说明并联电容的总电容值等于两者相加。
公式1是双极板电容的模型。它适用于触摸传感应用,因为在将手指靠近传感器极板时,手指的作用也类似于一个极板。传感器具有一定的标称电容C1(由于走线、附近的地线等原因而产生)。将手指靠近时,距离“d”下降,而![]() 和A上升,并引入了并联的附加电容“C2”。所产生的效果就是传感器线路上的电容上升,上升值等于附加电容C2。然后,软件必须通过硬件(向单片机中输入传感器读数)来检测电容变化。硬件将利用公式2(充电时间公式)的某种形式向单片机传达传感器读数。
和A上升,并引入了并联的附加电容“C2”。所产生的效果就是传感器线路上的电容上升,上升值等于附加电容C2。然后,软件必须通过硬件(向单片机中输入传感器读数)来检测电容变化。硬件将利用公式2(充电时间公式)的某种形式向单片机传达传感器读数。
传感器设计
传感器设计通常很简单。设计布线时,需要注意容性耦合效应及其关联的物理性质。焊盘的面积及覆盖在其上方的材料的厚度是最关键的因素。对于小键盘类型的应用,传感器的大小应当至少为将手指按平时,指尖面积的大小。根据公式1中的面积“A”,传感器较大时,其传感能力通常也较好。此外,人们并不一定能够恰好地控制手指的放置位置(从而控制产生的电容),而不同的两个人也不会具有完全相同的电容。所以,传感器的容限必须尽可能很大,可以处理遇到的各种触摸情况,同时始终准确地报告按下状态。
有些时候,指尖大小的传感器并不总是最佳的。作为一条准则,传感器焊盘上方的材料越厚,焊盘就必须越大,才能检测到是否有手指按下。这是因为根据公式1,当传感器焊盘上方的材料厚度增加时,距离“d”就会增大,从而手指的电容就会下降。对于需要非常精确的传感器控制的应用(例如,传感器很小),如果材料覆盖层很厚,则最终会限制传感器检查按下状态的能力。因此,如果传感器非常小,覆盖层必须尽可能薄。此外,如果非常小的传感器相互紧邻,还会产生容性耦合。在硬件中,在这样的传感器之间布置接地电路可以减少这种耦合效应。此外,还可以使用一些软件技巧来辨别相互耦合程度很高的传感器,这将在后面讨论。
目前为止,本文讨论了关于手指为传感器的标称寄生电容“Cp”引入附加电容的理论。为了获取读数,还需要另外填入两个大的功能模块。第一个是硬件,它将通过某种形式来捕捉电容变化;第二个是软件,它在传感器和应用级别解释系统中发生的情况。
硬件概述
用于捕捉传感器数据并将其转换为数值(读数)的硬件可采用许多方式开发。在电容触摸传感设计中,用硬件区分不同单片机供应商针对此应用推出的产品。根据公式2,可以测量和电流与电压关系有关的3个基本量:
1. 充电至固定电压需要的时间变化量(Δt,固定V)
2. 固定充电时间内的电压变化量(ΔV,固定t)
3. 固定时间周期中的频率变化量(Δf,固定T)
频率测量方案基于充电速率公式(重复许多次),但它对应于较长的周期T,而不是单个充电周期t。所以,充电至固定电压需要的时间变化量(Δt,固定V)和固定充电时间内的电压变化量(ΔV,固定t),定义了检测电容变化的基本方法。根据需要,可以基于这些基本方法来构造新的测量方案。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

