韩国智能模型车技术方案分析
这种方法的特点是用了较少个数的传感器进行道路识别,而且充分利用MCU里的ADC(Analog to Digital Converter)功能。
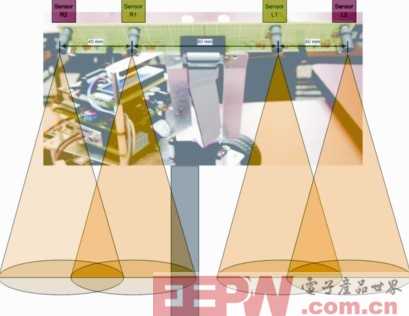
3、采用三个传感器进行线路识别,传感器放置在伸出车体的小电路板上(见图5)。安装在两边的传感器,可以算出偏移量及偏移方向。中间的传感器主要负责判断智能车是否脱离路线。小电路板可以用一个伺服电机控制左右轻微摆动来寻线。
转向伺服电机和驱动电机一般采用PID控制,部分设计仅对驱动电机采用PD控制,对伺服电机采用P控制,也能较好地完成速度和转向的控制。常见的其他控制方法,如模糊控制等,在2004和2005年公开的技术方案中没有涉及。
下面简单介绍驱动电机的PID控制算法。
对驱动电机的控制,通过下面公式实现。
其中,
、:当前和上次操作量
:当前操作量微分
、、:当前,上次,上上次偏差
、、的数值通过实验得到。为了得到与目标速度的偏差,要利用电机解码器或者其他的转速传感器测量当前驱动电机的速度。图10是PID控制框图。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码