基于模糊神经网络的移动机器人沿墙导航控制
B,C为模糊化层,即使用模糊语言来反应输入量的变化,隶属函数采用高斯函数,隶属度计算公式如下:
连接权重We、Wd决定了隶属函数的形状。
D层为模糊推理层,目的是将输入量进行综合处理,共采用了25条规则,它们由C,D,E的连接表示出来。模糊规则如下:
lf △di is M andθis N,then Vl is K and Vris L.
其中M=NB,NS,Z,PS,PB;N=L,LS,Z,RS,R;K,L=TL,G,TR。
E、F、G层为去模糊化层。F层有10个神经元,5个对应移动机器人的左轮速度,5个对应右轮速度。F层的结果隶属函数使用三角形隶属函数,目的是把在E层模糊语言描述的隶属函数转化为具体数值的隶属度。G层求解模糊结果,采用重心法,也叫加权平均法。求解过程是以控制作用论域上的点vi(i=l,2,…,n)对控制作用模糊集的隶属度u为权系数进行加权平均而求得模糊结果,对于离散论域vi:

3 沿墙导航控制计算模型
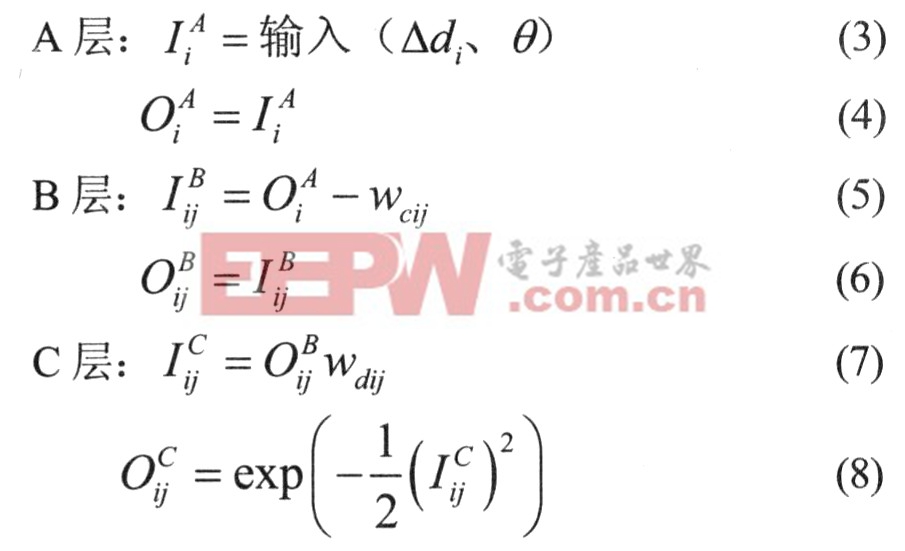
图l所示即为本文采用的BP前馈型神经网络结构,计算模型如下(I为该神经元的输入值,O为输出值,上标表示神经元所在的层):
D层:由输入变量自动生成模糊规则。

F层:输出隶属函数使用三角形函数,隶属度计算公式如下:


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
