基于速率的网络拥塞控制H∞反馈控制器设计
据此可对上述反馈系统的P0进行互质分解P0=ND-1,K能镇定P0的集合为:

式中:U,V,W均为稳定、正则、实有理函数。
2 H∞拥塞控制反馈控制器的设计
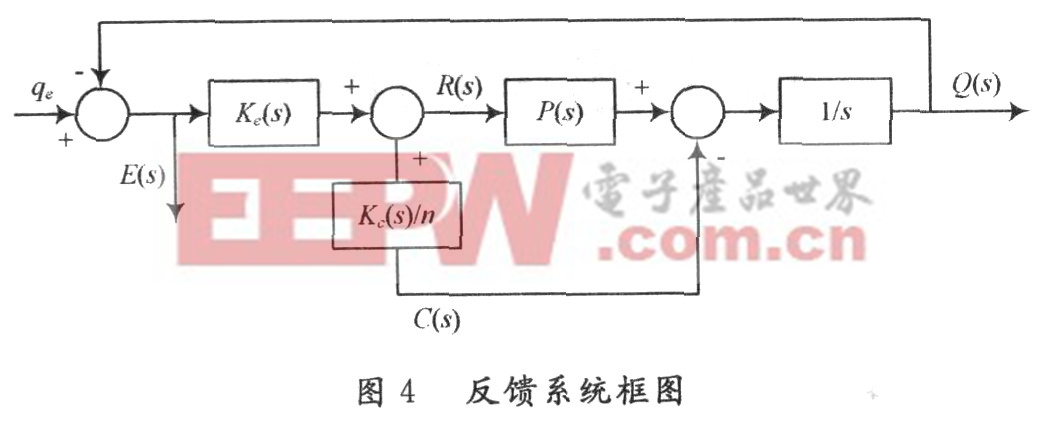
考虑到各源公平性的原则,设ri(t)由以下控制律决定:

其中e(t)=qe(t)一q(t),则反馈系统框图如图4所示。
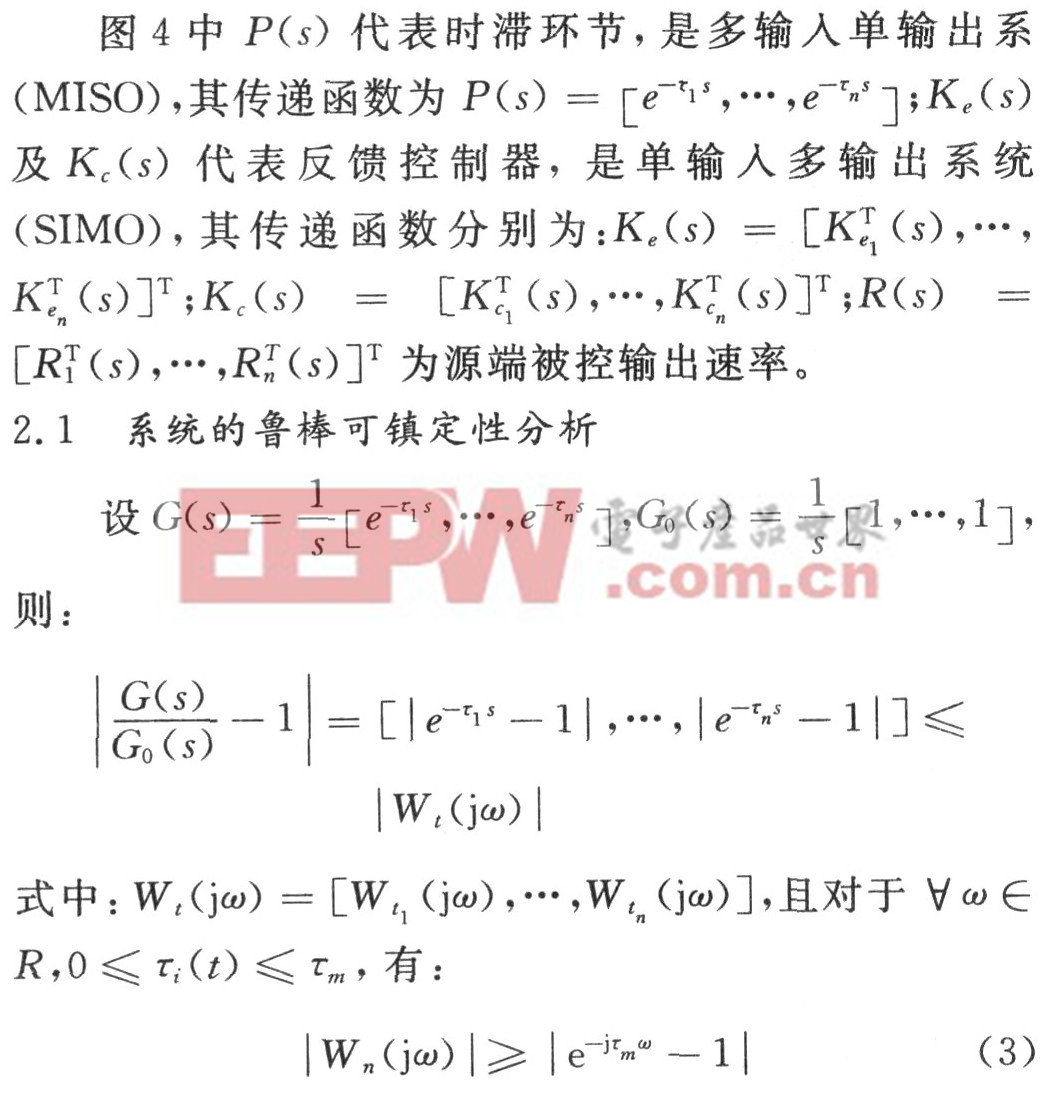
因此,由引理1知,对于上述不确定时滞系统可鲁棒镇定的充要条件是能镇定G0(s)的标称系统,且满足以下H∞性能指标: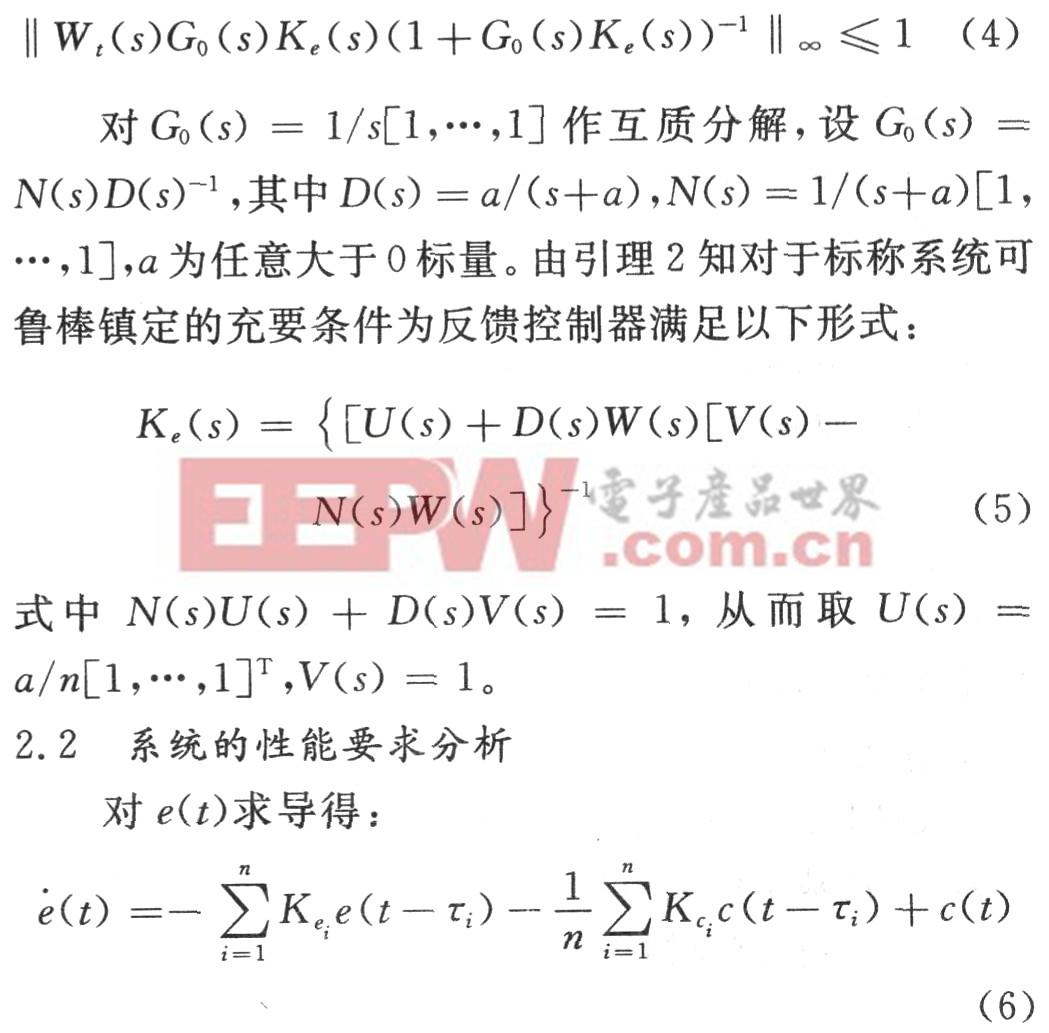
即有:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码