带修正因子模糊PID控制的PMSM交流伺服系统
较后的误差作为速度环和电流环的输入,从而构成了整个系统的闭环控制。
3 系统仿真结果
为了比较PID控制和Fuzzyr-PID控制性能,图3和图4给出了分别采用PID控制和Fuzzy-PID控制时的速度阶跃响应。
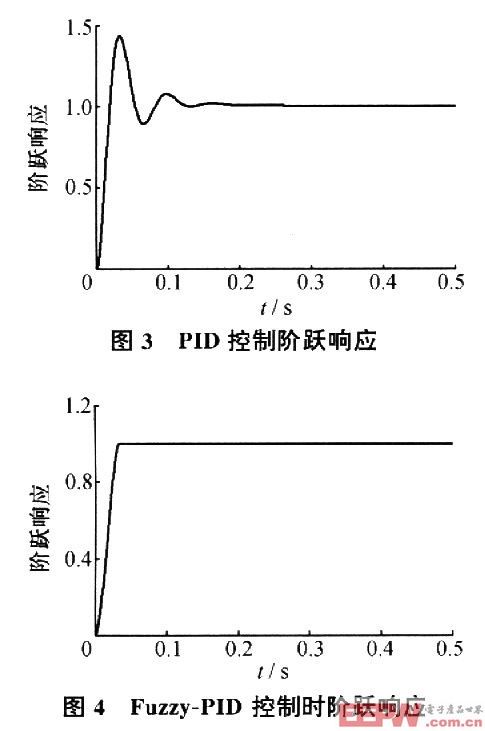
由图可以看出,当采用PID控制时,速度出现超调和振荡现象,这将在电机启动过程中造成很大的冲击;采用Fuzzy-PID后,无超调和振荡现象,鲁棒性好,系统响应速度明显改善。
图5和图6为对本系统采用Fuzzy-PID)控制时转矩Te和转速n的仿真图。由图可知,当负载转矩在0.2 s由4Nm突然增至7Nm时,转矩很快调整到新的稳定值;同时由于SVPWM的连续调节,转矩的脉动小;而转速在O.2 s时稍微下降,后迅速恢复原速度。
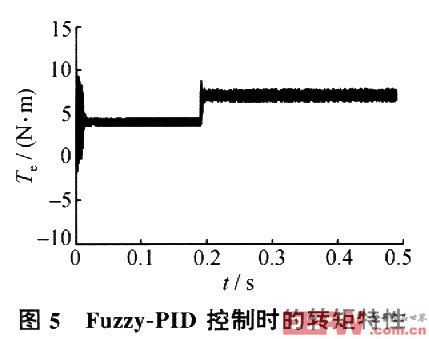
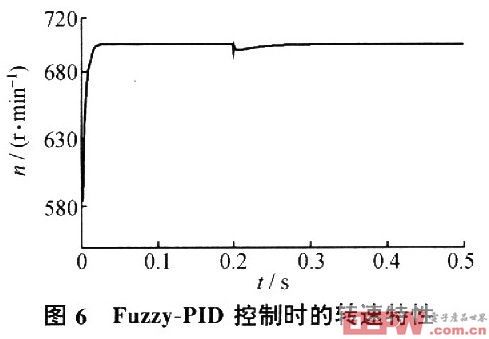
由此可见,系统所采用的控制策略具有跟踪性能好、响应速度快、过渡时间短、无超调、稳定性好以及控制精度高等特点,这与前面的理论分析是一致的。
4 结 论
本文将fuzzy控制和PID控制相结合,应用到PMSM交流伺服控制系统当中,不仅避免了控制器的设计时受被控对象的复杂数学模型的限制,而且克服了伺服系统的时变性、强耦合性和不确定性因素的影响,提高了系统响应速度和控制精度,跟踪性能好。另外,为了改善模糊控制器的性能系统控制,利用修正因子对模糊控制器的参数进行在线修改,保证了系统具有良好的动态和静态性能和鲁棒性,证明了此方法的正确性和可行性。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码