一种平均电流控制型开关调节系统的建模
摘要:文中对BUCK型DC—DC变换器进行了系统建模。为了得到包含平均电流调节开关控制方式的双环控制系统的简化模型,提出了一种电流环闭环传递函数的近似函数,并分别对电流控制器,电流补偿网络和功率级进行了建模,采用Mathcad进行仿真,得到系统相位裕度达到54°的结果。
关键词:BUCK型DC—DC;平均电流控制;建模分析;相位裕度
开关电源是利用现代电力电子技术,通过控制功率管导通和关断,维持稳定输出电压的一种电源,一般由控制芯片和功率器件(功率MOS FET或IGBT)构成。开关电源具有集成度高、外围电路简单、电源效率高等优点,在各种电子产品中得到广泛的应用。因此对开关电源的建模提出了很高的要求。文中提出了针对BUCK型的平均电流控制型开关调节系统的建模分析,运用Mathcad建模工具对其进行仿真,使其开关电源系统最终相位裕度达到54°。
1 平均电流控制性开关电压基本原理
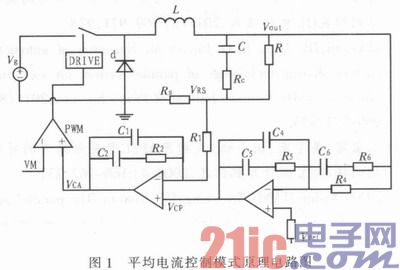
开关电源调节控制模式一般分为电压型和电流型。对于电压型控制开关调压系统,其工作原理是当输出电压发生变化时,其经过电压采样网络得到电压信号作为反馈信号,实现闭环控制。系统中只有反馈电压环,因此也被称为单环控制系统。单环控制系统的优点是结构简单、设计方便,但是当系统受到某种干扰时,系统中的各项参数量均会发生变化,但是由于单环工作原理,系统必须等到输出电压发生变化时,控制网络才能起作用,从而造成开关电源的效率降低。针对以上问题,文中提出了一种平均电流控制的BUCK型双环开关调节系统,其原理框图如图1所示。图中是系统采用双环控制原理,分为电流内环控制和电压外环控制,通过直接串联电阻,对电感电流实时采样,将信号连接于电流控制器的反相端,同时电压外环采用带有补偿网络的误差放大器,其输出的误差电压连接到电流控制器的正端,再对电流控制器进行积分处理,实现平均电流控制,其得出的信号与锯齿波通过PWM比较器进行比较,从而通过驱动电路完成整个系统的控制。
2 平均电流建模分析
根据设计指标,电流采样电阻Rs=0.1 Ω,开关频率fs=500 kHz,输出电容为C=220μF,ESR电阻为Rc=0.15 Ω,电感L=47μH,输入电压为10 V,输出稳定在8 V,锯齿波的峰峰值VM=5 V。文中根据上述指标用Mathcad对整个平均电流控制型DC—DC进行建模分析。其中Rc电阻为电容的寄生电阻。
2.1 平均电控制模式电流环闭环分析
电流控制环是由部分开关变换器、电流采样器、电流控制器和开关控制器等组成,因此可以把电流控制环等效为一个新的功率级,等效功率级与电压控制器组成了电压控制环。电流控制环是内环,实现电流自动控制;电压控制环是外环,实现电压自动调节。
2.2 电流控制器设计
根据上面的指标参数,可以确定电流补偿网络在开关频率处的最大放大倍数:
根据系统的稳定性分析,希望在直流频率点附近,系统的增益要很大,在中频段其幅频特性的下降频率应为-20 dB/dec,在高频阶段,为了有效的抑制噪声,通常将高频极点fp设置在开关频率处或低于开关频率。从而在确定低频零点频率fz和高频极点频率fp,根据电容电阻反馈网络公式,得出以下方程:
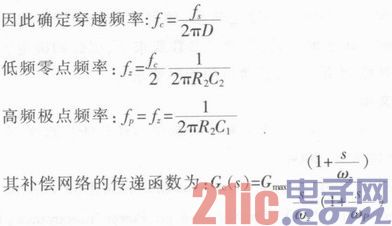
2.3 平均电流控制模式电流环的闭环分析
在上述分析中,将电流控制内环等效成一个功率级,其电流环闭环框图如图2所示。

2.4 闭环传递函数的简化模型
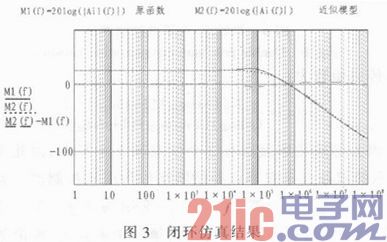
从上式中可以发现该系统为一个高阶系统,对于分析和设计带来了很大的困难,因此本文提出了一个近似模型。用一个双极点模型来近似取代闭环传递函数,并通过Mathcad仿真后,其所得的图像如图3所示,近似逼近模型函数:

分析两个仿真结果可知:在低频下,2个函数图形基本可以等效,在高频下,误差随着频率的增加而相应的变大。因此近似模型可以作为闭环的模型。(其中图中的为电流控制环的原函数图形,为电流控制环的近似模型)
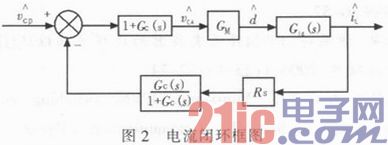
2.5 功率级的等效模型
等效功率级是由电流控制环及其负载组成,其框图如图4、5所示。

2.6 电压补偿网络设计
对于整个系统,是由电流环控制等效成的一个新的功率级和电压外环组成。电压外环的补偿网络的传递函数如图6所示。
传递函数为:

因为等效功率级具有3个极点和1个零点,因此采用图6所示的双极点一双零点补偿网络作为电压控制器。其中令第一个极点fp01抵消等效功率级的ESR零点fz,第二个极点fp02=fs,来增加高频时的噪声抑制,第一个零点fz01抵消等效功率级的fp1,第二个零点fz02=fp2,来抵消电流环的另一个极点。
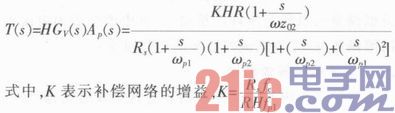
开关电源系统最终传递函数为:
2.7 开环传递函数的仿真结果
根据上面的传递函数公式和本文中给出的参数,通过Mathcad仿真,可以得出其系统的幅频特性和相频特性,如图7、8所示。计算可得系统中近似模型的相位裕度达到了54.022°系统的原函数的相位裕度为53.595°,均达到工程要求。两者相位裕度仅相差0.427°,误差相对较小,并且运用近似模型给整体系统的设计带来了很大的便利。

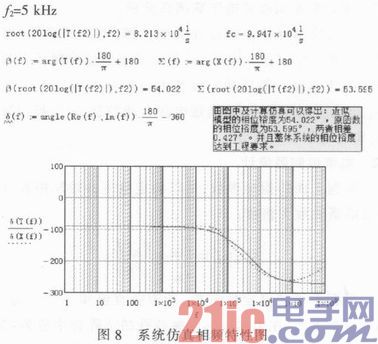
由图可见:
在低频段,幅频特性的下降斜率为-20 dB/dec,在低频处存在一个零极点,系统的静态误差等于零。
在中频段,幅频特性的下降频率为-20 dB/dec,系统有足够的相位裕度,所以电压控制环一定是稳定的。
在高频段,幅频特性的下降斜率为大于或等于-40 dB/dec,系统具有很高的抗噪声能力。
3 结论
文中通过对BUCK型DC—DC建模,提出了一种平均电流模式的开关调节系统,相对于传统的单环电压式控制,其可以得到更好的动态性能。为了设计更加简便,提出了电流模式的近似函数,经过最终的仿真,其相位裕度达到54°,满足DC—DC稳定性的要求。该设计采用双环控制的方法,有效的增加了开关电源的稳定效率,使得外部影响因素减小。采用Mathcad建模工具,在项目参数要求下,很好的确定了其双环的补偿网络,达到了项目的指标要求。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
