“夜猴”跳跃机器人惊艳全球媒体 敏捷性达到每秒1.7米
加州大学伯克利分校(UC Berkeley)仿生微系统实验室(Biomimetic Millisystems Lab)研发出了一个微型跳跃机器人Salto,体重仅有100g,是目前最敏捷、跳跃能力最好的有腿跳跃机器人,平均每隔0.58秒就可以进行一次高达1米的跳跃,跳跃敏捷性为1.7 m / s。这项研究成果发表于国际著名杂志《科学》(Science)的最新子刊《科学·机器人》(Science Robotics)的创刊号上。

当天,麻省理工科技评论、华盛顿邮报、路透社、每日邮报、每日电讯、南华早报、美国之音、CNET、Gizmodo、Popular Science、Engadget、Mashable、IEEE Spectrum等全球媒体纷纷刊文报道了这项技术。
由罗纳德·菲尔林(Ronald Fearing)领导的加州大学伯克利分校仿生微系统实验室一直致力于模拟生物的操纵、运动、感知、驱动以及控制策略等特征来从根本上改善微型机器人的性能,并以其出色的微型仿生机器人而著名。
其中,邓肯·霍尔丹(Duncan Haldane)的发明成果最多,包括奔跑机器人、带翅膀的机器人、带尾巴的机器人甚至带头发的机器人等。霍尔丹团队特别擅长寻找那些最有才华和能力的动物作为其仿生设计的灵感来源。Salto就是由霍尔丹团队研发出的。

Salto的设计灵感来自于自然界中最佳跳高运动员之一——夜猴(galago)。夜猴是一种小型的非洲灵长类动物,体重只有几公斤,单次跳跃就能超过高高的灌木丛(约2米)。

生物学家在十多年前才知道夜猴这种超高跳跃能力的秘诀:夜猴利用腿部结构放大其肌肉和肌腱的力量。起跳之前,夜猴会蹲伏延长起跳阶段足部与地面的接触时间,将更多力量上传到伸展的肌腱中。这样,比起单使用肌肉力量,这种机制能让加速度提升15倍多。
研究者称,有效的跳跃运动不仅仅指跳跃的高度,还在于跳跃的频率。此处的“敏捷性”指的是微型机器人在不断重复跳跃过程中能达到的跳跃高度,更专业的说法是“跳跃系统在进行重复跳跃运动时能达到的最大平均垂直速度”。所以,假设夜猴每0.78秒能够跳跃1.7米高度,其敏捷性为2.2米每秒。
为了达到高度敏捷性,不仅要跳的高,还要跳的频繁。例如,瑞士洛桑联邦理工大学(EPFL)开发的蚱蜢仿生跳跃机器人的垂直跳跃高达1.3米,但却只能每隔4秒跳跃一次,所以其敏捷性很低。相比之下,宾夕法尼亚大学(University of Pennsylvania)开发的四腿跳跃机器人Ghost Minitaur跳跃高度只有0.48m,却能够每0.43秒跳跃一次,所以尽管其跳跃高度较低,但是其敏捷性却较高。
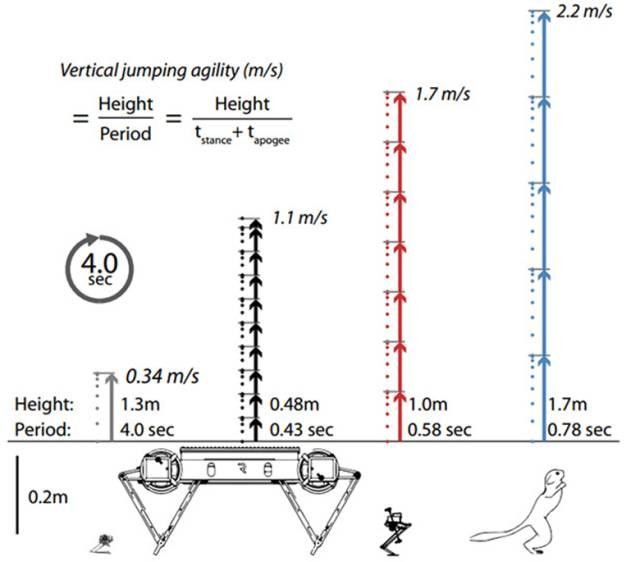
不同驱动类型的跳跃机器人系统的敏捷性:时间周期为4s,自左向右分别为并联弹性体驱动的EPFL跳跃机器人、刚性的Minitaur机器人、串联功率调节式驱动的夜猴仿生跳跃机器人(本文)以及动物夜猴。每个箭头代表一次跳跃运动;箭头右侧数字分别表示跳跃高度和跳跃周期;顶部数字表示敏捷性。
提升敏捷性涉及到提升跳跃高度或跳跃频率,或着(通常)两者都提升。夜猴虽然能够跳的很高,但使其如此敏捷的还是其快速周而复始的跳跃能力。大多数跳跃机器人都具有低敏捷性(如EPFL蚱蜢机器人),因为其必须耗费时间收缩弹簧以便储存足够的能量用于再次跳跃,这当然会拉低其跳跃频率。
关键词: 机器人

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
相关文章
-
-
-
-
-
工控自动化 2024-07-22

-
-
-