基于1553B总线的航天大功率电动舵机控制器设计
3.1 DSP主程序设计
DSP主要实现了控制系统主程序和电流、位置、速度三闭环数字PID控制算法。FPGA将接收到的舵面偏转信号和采集到的转子位置、转速和实际舵面偏角传递给DSP,DSP结合自身ADC采样电流信号,通过算法处理,输出调制PWM。程序流程如图5所示。
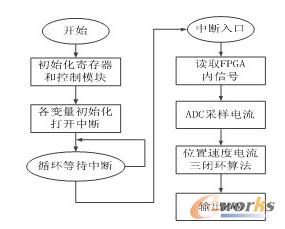

图5DSP主程序流程 3.2 FPGA逻辑程序设计
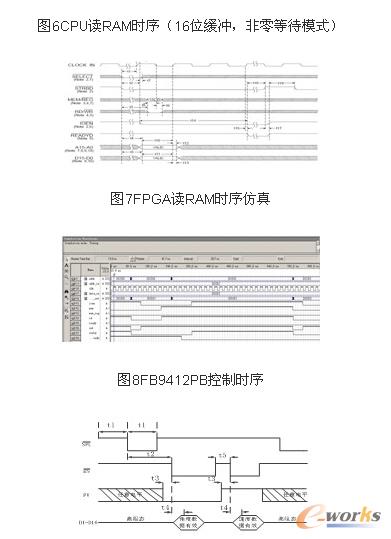
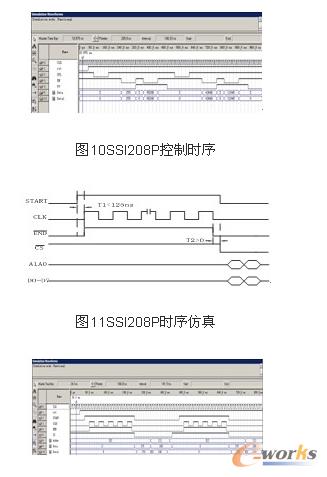
FPGA程序采用模块化设计思想,实现了BU-61580读写RAM控制时序、FB9412PB控制时序、SSI208P控制时序和DSP接口控制逻辑。各个模块的时序控制如图6-11所示。
4 结论
本文设计实现了一套基于1553B总线通讯的大功率无刷直流电动舵机控制器,利用DSP高速运算性能实现电流、速度、位置三闭环控制算法,充分运用FPGA灵活可配置性设计时序逻辑控制电路,采用BU-61580协议芯片实现1553BRT终端控制器。实际应用表明,该控制器控制精度高、调节速度快,具有良好的工程应用价值。
关键词: 1553B总线航天电动舵机控制

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码