步进电机控制系统的设计方案
现以三相反应式步进电机来分析两种细分方式。
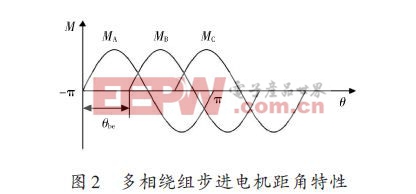
三相反应式步进电机三相绕组分别通电时,其矩角特性为彼此相差120°电角度的正弦曲线,如图2所示。
当A、B两相通电时,设电流分别为iA、iB,相应的静转矩为MA、MB,忽略磁路之间的影响,其合成矩角特性为二者相叠加,如式(3)所示:
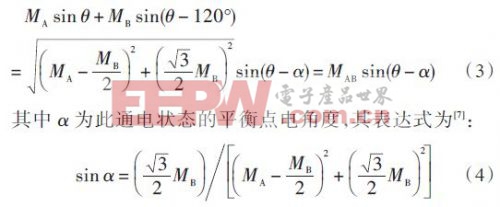
由公式(3)和(4)可知,当步进电机的电流按照线性规律变化时,其距特性如图3(a)所示。由于距角特征幅值因通电电流的不同而各不相等,因此各细分步的步距角就不能保持一致。理想的细分电流波形应使各通电状态下的步距角特性的幅值、形状均相等,如图3(b)所示。
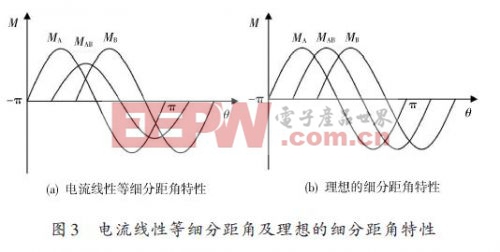
因此电流按线性规律变化的细分方式使得细分后的每一小步的控制精度不相等。而如果按等步距角细分,则细分后的步距角为:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码