PLC控制伺服电机准确定位的方法
RD-SPACING: 0px; FONT: 12px/18px 宋体, arial; TEXT-TRANSFORM: none; COLOR: rgb(95,95,95); TEXT-INDENT: 0px; WHITE-SPACE: normal; LETTER-SPACING: normal; BACKGROUND-COLOR: rgb(255,255,255); orphans: 2; widows: 2; -webkit-text-size-adjust: auto; -webkit-text-stroke-width: 0px">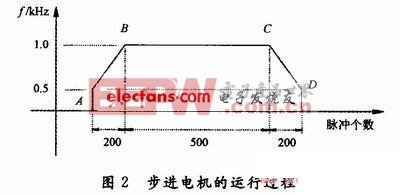

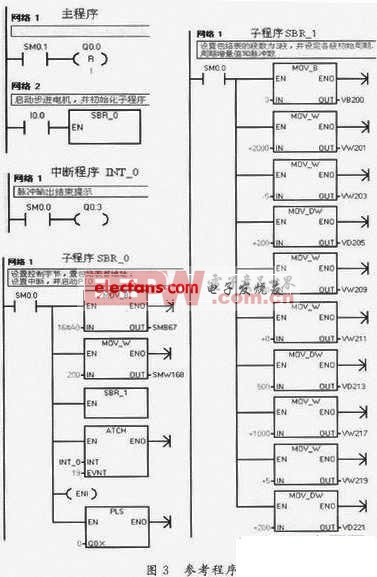
因此确定PTO为3段脉冲管线(AB,BC,CD)。设最大脉冲频率为1 kHz,将16#A0写入控制字节SMB67,允许多段PTO脉冲输出,时基为μs级,建立3段脉冲的包络表并对各段参数分别设置,给定段的周期增量按下式计算:
给定段的周期增量=(该段结束时的周期值-该段初始的周期值)/该段脉冲数
包络表结构如表1所示。
参考程序如图3所示。
这种控制方式属于对步进电机的一种开环控制,其优点是结构简单、成本低、定位准确、易于实现等。
2.3 控制系统在设计与实施过程中的注意事项(1)PLC类型的选择。首先,PLC必须是可以输出高速脉冲的晶体管输出形式。其次,PLC输出最高脉冲频率大小必须满足控制要求。
(2)步进电机脉冲细分驱动器的选择及参数设置。
(3)步进电动机的选择。首先考虑的是步进电动机的类型选择,其次才是品种选择,根据系统要求,确定步进电动机的电压值、电流值以及有无定位转矩和使用螺栓机构的定位装置,从而就可以确定步进电动机的相数和拍数。在进行步进电动机的品种选择时,要综合考虑速比i、轴向力F、负载转矩Ti、额定转矩TN和运行频率fy,以确定步进电机的具体规格和控制装置。
(4)脉冲当量的计算。
3 利用PLC的其他方式实现的准确定位

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码