双接收头在智能小车系统中的应用
将公式6想减的两项做除法不难发现第一项始终大于第二项,所以z2-z1是关于l的增函数, 同时随着h的减小,z2-z1同样会变大,也就是说当障碍物体靠近小车时,如果其偏离了小车的中心(即不会撞到)有一个明显的特征为其z2-z1的值会比较大,我们可以取d=5cm h=30cm, 让l在[10cm,30cm]间变化,做出的曲线如图3所示,各个物理量的几何关系见图4 。
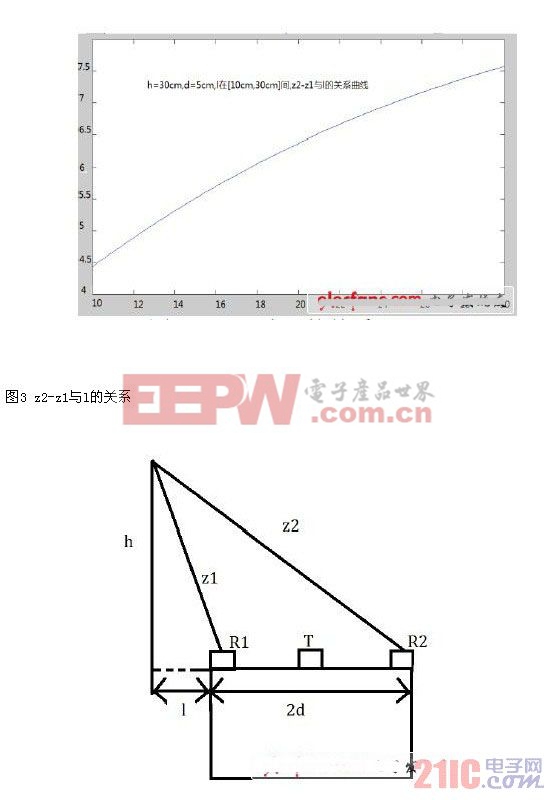
图4 各个物理量的几何关系

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码