新型PID算法--大林控制算法原理
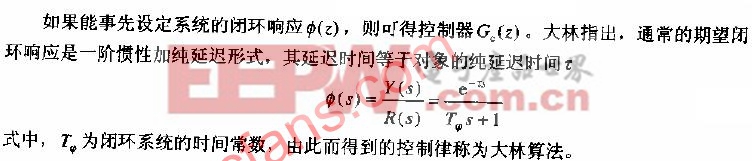
早在1968年,美国IBM公司的大林就提出了一种不同于常规PID控制规律的新型算法,即大林算法。该算法的最大特点是将期望的闭环响应设计成一阶惯性加纯延迟,然后反过来得到能满足这种闭环响应的控制器。
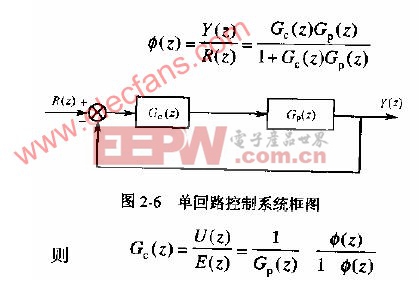
对于如下图所示的单回路控制系统,Gc(z)为数字控制器,Gp(z)为被控对象,则闭环系统传递函数为

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
早在1968年,美国IBM公司的大林就提出了一种不同于常规PID控制规律的新型算法,即大林算法。该算法的最大特点是将期望的闭环响应设计成一阶惯性加纯延迟,然后反过来得到能满足这种闭环响应的控制器。
对于如下图所示的单回路控制系统,Gc(z)为数字控制器,Gp(z)为被控对象,则闭环系统传递函数为
加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码