基于WLS-KF的GPS非线性动态滤波研究
1.3.2 算法流程
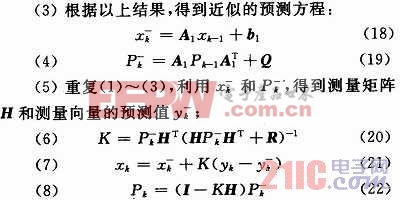
将加权最小二乘线性化方法同KF算法相结合,便得到了WLS-KF算法。具体的算法流程如下:
(1)设置矩阵A,b和加权矩阵W;
(2)将A,b和W带入式(17),求出线性化系数矩阵A1,常数向量b1;
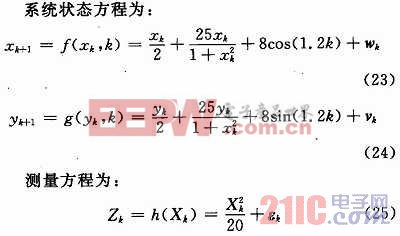
2 实验结果与分析
基于运动载体为质点的假设建立目标运动模型,考虑一个二维平面曲线运动系统,状态定义为

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码