UPS逆变器的重复控制器参数的仿真分析
的位置在ω=π/T处。
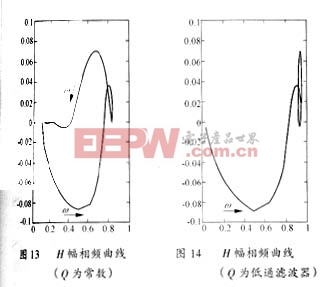
通过仿真实验发现依照这种方法选取的Q,其输出稳态误差比Q取作常数时更小得多(参见图11),这是因为低通Q实现了更好的跟踪krzkPS轨迹的效果,尤其是在高频的时候。比较图13,图14中H的幅相频曲线上可以很清楚地反映不同Q跟踪krzkPS的过程。
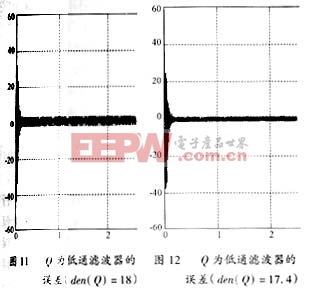
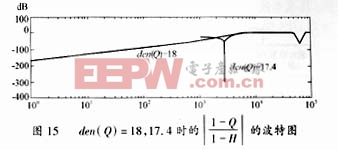
当适当调整den(Q),系统的稳态误差也跟着变动,而且调到适当位置,稳态误差将被降得很小。图11中den(Q)=18,图12中den(Q)=17.4时,而稳态误差图12明显小于图11。绘出den(Q)=17.4,18时的![]() 的波特图(见图15),虽然den(Q)=18在中低频段比den(Q)=17.4的幅值小,但den(Q)=17.4在103-104间有一个波谷,在该处的幅值比den(Q)=18小得多,所以其总体效果要比den(Q)=18好。
的波特图(见图15),虽然den(Q)=18在中低频段比den(Q)=17.4的幅值小,但den(Q)=17.4在103-104间有一个波谷,在该处的幅值比den(Q)=18小得多,所以其总体效果要比den(Q)=18好。
4结语
根据前面的讨论,在重复控制器的设计中,关于关键参数补偿器Q的设计,可以做出以下总结:
1)通过调节Q,可以提高系统的稳态精度,改善系统性能。
2)Q有两种选择:常数与低通滤波器,后者比前者的控制性能更优,但增加了软件实现上的难度。
3)当Q选取为低通滤波器时,若适当调节Q的分母,可以大大降低系统的稳态误差。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码