卡尔曼滤波器及多传感状态融合估计算法
Carlson 在1990 年提出了一种最优数据融合准则。
设 分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设
分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设 不相关, 则最优联邦滤波器最优数据融合准则由下式给出:
不相关, 则最优联邦滤波器最优数据融合准则由下式给出:

其中:

相应的估计误差协方差矩阵为:

可以证明:

其中P(k|k)表示 的估计误差协方差。
的估计误差协方差。
基于第i 个传感器信息的Kalman 滤波估计器如图1 所示。Carlson 联邦融合估计算法流程图如图2 所示。
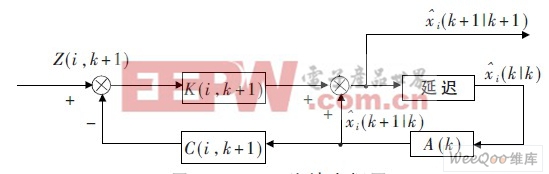
图1 Kalman 滤波方框图

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码