方位双稳定转台伺服系统的设计与实现
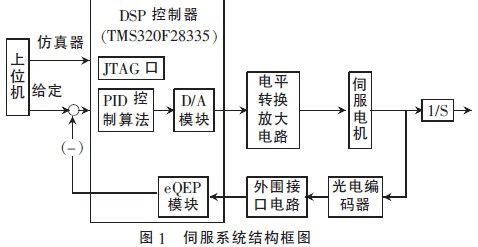
转台控制计算机软件采用Windows NT操作系统,便于开发,具有高可靠性、安全性等特点。软件模块主要包括实时控制和人机接口两部分。实时控制部分主要包括数据采集、坐标变换、网络及串口通讯、控制保护等;人机接口部分主要包括显示管理、参数管理、故障监测等模块。驱动电路由电机一测速机组、功率放大器、电流环、速度环和EMI滤波电路组成。主要用于功率放大、电流控制等。驱动电机选用永磁直流力矩电机,功率放大选用线性功率放大器,动态性能好,电磁干扰小、简单、可靠。稳定陀螺选用航空速率陀螺,构成陀螺稳定环,以隔离动载体姿态变化对跟踪的影响。转台控制器的主要工作方式有待机、指向、程序跟踪。
3 转台
双转台是安装于某工程动载体上的机电设备,转台采用高精度齿轮驱动,为控制转台的重量及满足动载体设备的环境要求,选用铝合金材料柔性加工,齿轮及轴采用合金钢,轴承采用高精度圆锥滚子轴承及球轴承,以便于提高转台刚度和机械性能。
4 稳定转台引导原理
稳定转台引导原理图如图5所示,它利用惯性导航系统(INS)给出动载体所在的地理经度、纬度,动载体姿态参数(动载体相对正北方向的航向角k、动载体相对水平面的横滚角φ、动载体相对水平面的俯仰角θ),再根据上位机的位置指令,通过控制计算机计算两个转台的方位角,进行引导,使转台实时随动于上位机指令。
3 转台
双转台是安装于某工程动载体上的机电设备,转台采用高精度齿轮驱动,为控制转台的重量及满足动载体设备的环境要求,选用铝合金材料柔性加工,齿轮及轴采用合金钢,轴承采用高精度圆锥滚子轴承及球轴承,以便于提高转台刚度和机械性能。
4 稳定转台引导原理
稳定转台引导原理图如图5所示,它利用惯性导航系统(INS)给出动载体所在的地理经度、纬度,动载体姿态参数(动载体相对正北方向的航向角k、动载体相对水平面的横滚角φ、动载体相对水平面的俯仰角θ),再根据上位机的位置指令,通过控制计算机计算两个转台的方位角,进行引导,使转台实时随动于上位机指令。
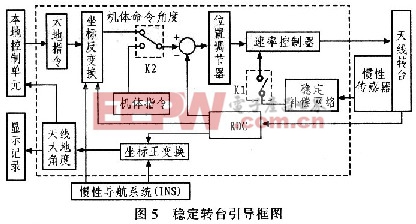
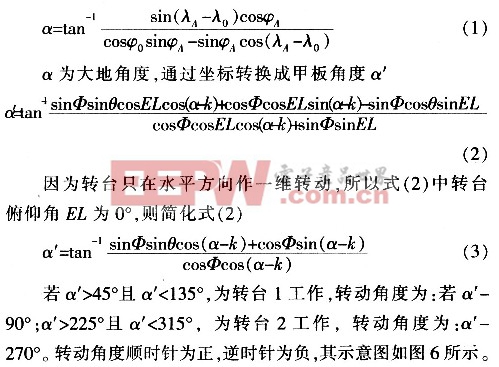
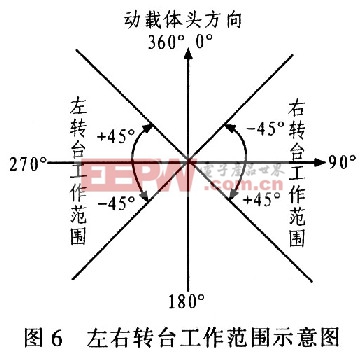
根据本地控制单元的命令和动载体上的INS测出的动载体位置经纬度和动载体姿态,可以计算出转台对目标跟踪的机体角度,假设动载体经度为λ0,纬度为φ0;目标点经度为λA,纬度为φA;则两点的方位角α
5 结束语
该项目伺服系统已成功应用,经过环境鉴定试验、可靠性鉴定试验、整机电磁兼容试验、科研试飞验证,满足各项指标要求,为后续项目进一步发展奠定坚实基础。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码