单片机自动巡线轮式机器人控制系统设计
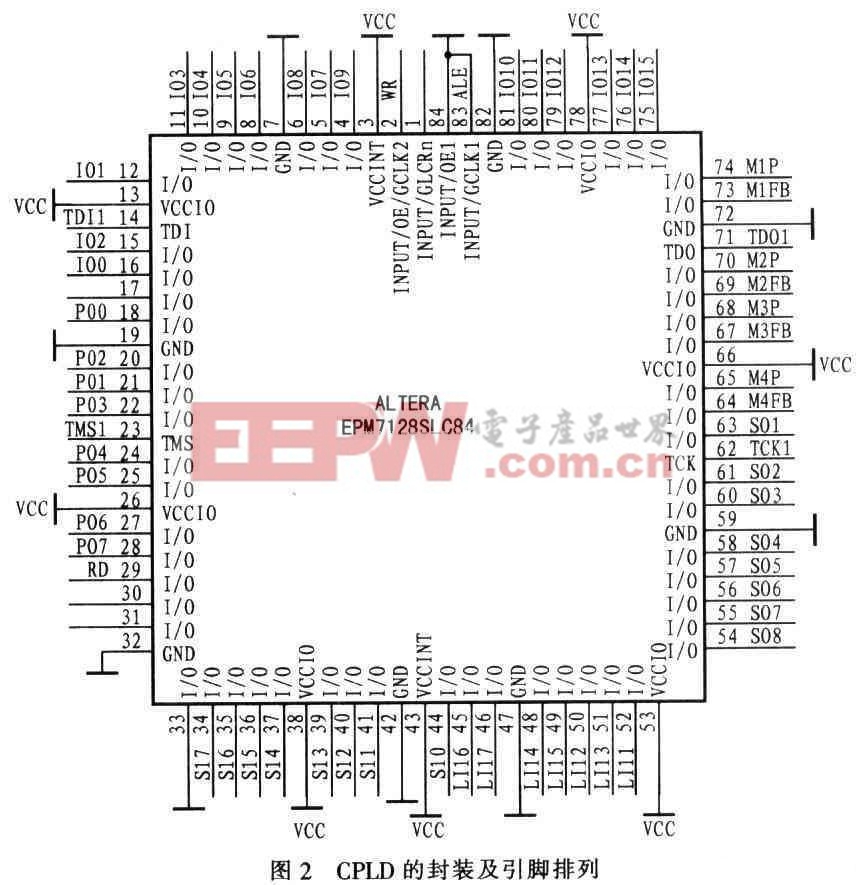
EPM7128的引脚排列
单片机采用24MHz的晶体振荡器,ALE信号的频率fALE=f16=6MHz,最终输出PWM信号的引脚MlP的频率为:
公式
调节这个信号的占空比可以使直流电动机获得O-255级的转速。
3.2 机器人运行参数存储器的扩展
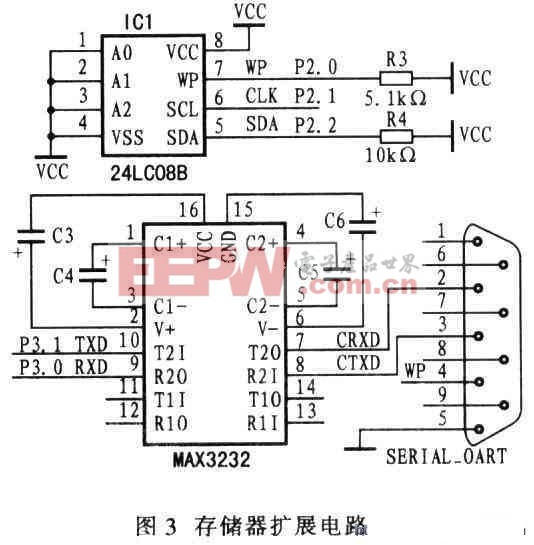
机器人运行路径和动作可以根据比赛情况的不同而发生变化,这样,每改变1次运行参数就必须对单片机的Flash进行1次擦写。为了解决这一问题.扩展了程序参数存储器,用来存放机器人的运行路径和动作参数.扩展电路如图3所示。
扩展电路
其中IC1为24LC08B,是I2E总线的串行E2PROM存储器,最多能够存储lK字节的数据。IC2为MAX3232型电平转换器,其内部有1个电源电压变换器,可以将计算机的电平转换为标准TTL电平,实现计算机与单片机之间通过串行口传输数据,使单片机完成对24/LC08B的数据存储操作。单片机运行时,直接从24LC08中读取机器人的运行参数,控制机器人运行。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
